Математическая модель
В соответствии с теоремами об изменении количества движения и момента количества движения, проекции всех сил и моментов, действующих на АПА, на оси ССК представляются в виде:
где:
- Fxinerc, Fyinerc, Mzinerc - проекции инерционных силы и момента на оси ССК
- FxGD, FyGD, MzGD - проекции гидродинамических силы и момента на оси ССК
- Mzost - проекция момента остойчивости на ось Oz ССК
- FxIO, FyIO, MzIO - проекции сил и моментов от исполнительных органов (ИО) на оси ССК
- Fxf, Fyf, Mzf - проекции возмущающих силы и момента на оси ССК
Проекции инерционных силы и момента на оси ССК описываются уравнениями:
где:
- Vx, Vy, ωz - продольная скорость, вертикальная скорость, проекция угловой скорости на ось Oz ССК
- m - масса АПА
- Jzz - момент инерции АПА относительно оси Oz ССК
- Ya - отстояние центра величины от центра масс по оси Оу ССК (метацентрическая высота)
- λ11, λ22, λ33 - присоединённые массы
- λ26 - присоединённый статический момент
- λ66 - присоединенный момент инерции
С учетом системы уравнений для проекций инерционных силы и момента на оси ССК и кинематических соотношений линейных и угловых координат АПА, система уравнений проекций инерционных силы и момента на оси ССК преобразуется к виду:
где:
- Fx1inerc, Fy1inerc, Mz1inerc - проекции инерционных силы и момента на оси ССК, без учета производных переменных состояния соответствующей проекции
- ξ, η, Ψ - проекции гидродинамических силы и момента на оси ССК
Приведенная система уравнений полностью описывает движение АПА в вертикальной плоскости.
Составляющие Vx, Vy, ωz, ξ, η, Ψ и V̇x, V̇y, ω̇z, ξ̇, η̇, Ψ̇ в уравнении образуют вектор переменных состояния и вектор производных переменных состояния для движения АПА в вертикальной плоскости.
Проекции гидродинамических силы и момента на оси ССК описывается уравнениями:
где:
- ρ - плотность забортной воды
- W - водоизмещение АПА
- Cx1, Cy1, mz1 - ГДХ продольной гидродинамической силы, нормальной гидродинамической силы и дифферентующего гидродинамического момента
- knorm - нормирующий коэффициент
ГДХ АПА описываются уравнениями:>
где:
- V̄y, ω̄z - нормированные по скорости хода АПА значения нормальной скорости и проекции угловой скорости на ось Oz ССК
- Cx10, Cx12, Cx12m2, Cx122, Cx16m6, Cx166 - безразмерные коэффициенты ГДХ продольной гидродинамической силы
- Cy10, Cy12, Cy12m2, Cy122, Cy16m6, Cy166 - безразмерные коэффициенты ГДХ нормальной гидродинамической силы
- mz10, mz12, mz12m2, mz122, mz16m6, mz166 - безразмерные коэффициенты ГДХ дифферентующего гидродинамического момента
Проекция момента остойчивости на ось Oz ССК описывается уравнением:
Проекции сил и моментов от исполнительных органов на оси ССК представляются в виде:
где:
- FxR, FyR, MzR - проекции сил и моментов от рулей на оси ССК
- FxGV, FyGV, MzGV - проекции сил и моментов от гребного винта АПА на оси ССК
Проекции сил и моментов от рулей описываются уравнениями:
где CxR, CyR, MzR - ГДХ продольной силы от руля, нормальной силы от руля и дифферентующего момента от руля.
ГДХ рулей описываются уравнениями:
где:
- δ - текущий угол перекладки руля
- Cx2 - безразмерные коэффициенты ГДХ продольной силы от руля
- Cy1, Cy1m1, Cy3, Cy3m1 - безразмерные коэффициенты ГДХ нормальной силы от руля
- mz1, mz1m1, mz3, mz3m1 - безразмерные коэффициенты ГДХ дифферентующего момента от руля
Проекции сил и моментов от гребного винта АПА описываются уравнениями:
где KxGV – коэффициент в уравнении тяги гребного винта.
Проекции возмущающих силы и момента на оси ССК описываются уравнениями:
где:
mf, - масса принятого балласта (возмущающего воздействия)
Xf - продольная координата (возмущающего воздействия)
Влияние течения на движение АПА учитывается введением в уравнения движения АПА проекций вектора скорости течения с учетом его углов атаки и дрейфа по отношению к АПА.
Расчет проекций вектора скорости течения осуществляется по формулам:
Расчет проекций вектора скорости течения на оси связанной системы координат (ССК) осуществляется по формулам:
Значения проекций скорости хода МПО на оси НСК (абсолютные значения, то есть с учетом влияния течения) формируются как сумма значений проекций скорости МПО в ССК и значений проекций вектора течения на оси ССК:
Дополнительно реализуется расчет угла атаки α по следующей формуле:
Значение параметров АПА, их исполнительных органов приведены в таблицах (Таблицы 1, 2, 3, 4, 5, 6 в разделе "Исходные параметры и моделируемые режимы движения АПА"). Параметры моделируемых режимов приведены в таблице (Таблица 7 в разделе "Исходные параметры и моделируемые режимы движения АПА").
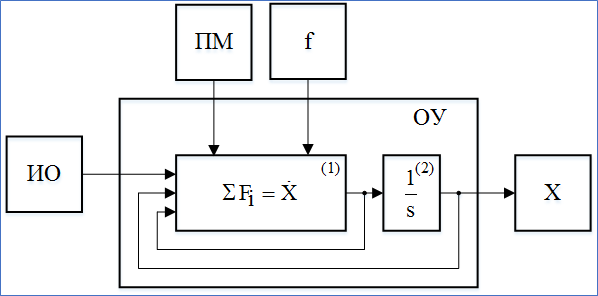
- ИО – исполнительные органы АПА
- ОУ – автономный подводный аппарат (АПА)
- Блок (1) – блок расчета производных переменных состояния как сумма всех сил и моментов, действующих на АПА, с учетом производных линейных и угловых координат
- Блок (2) – интегрирующее звено
- ПМ – начальные параметры моделирования
- f – возмущающее воздействие
- X – выходной вектор переменных состояния