Оптимизация параметров системы автоматического регулирования
Лабораторная работа №7 по курсу "Управление в технических системах"
Цель работы
- Ознакомление с процедурами оптимизации в SimInTech на примере синтеза оптимального интегрирующего регулятора
Формулировка заданий на параметрическую оптимизацию САР
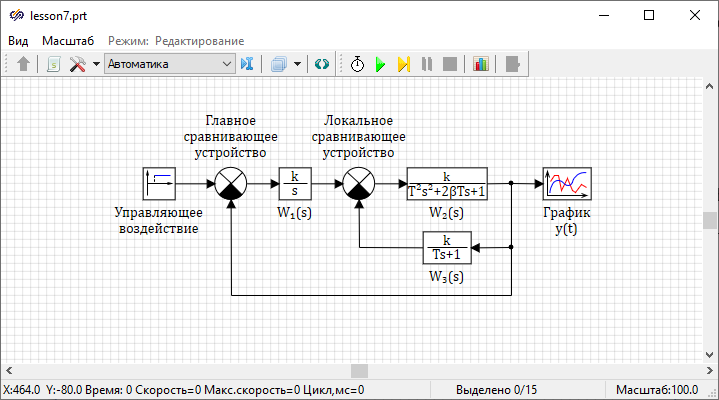
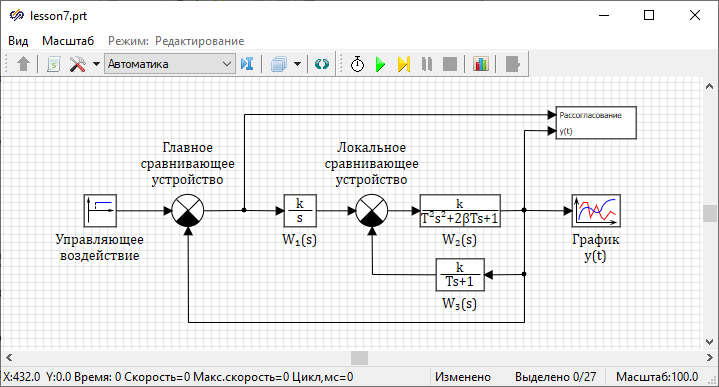
- "Коэффициент усиления" = "1"
- "Постоянная времени" = "1"
- "Коэффициент демпфирования" = "0.5"
- "Коэффициент усиления" = "0.6"
- "Постоянная времени" = "5"
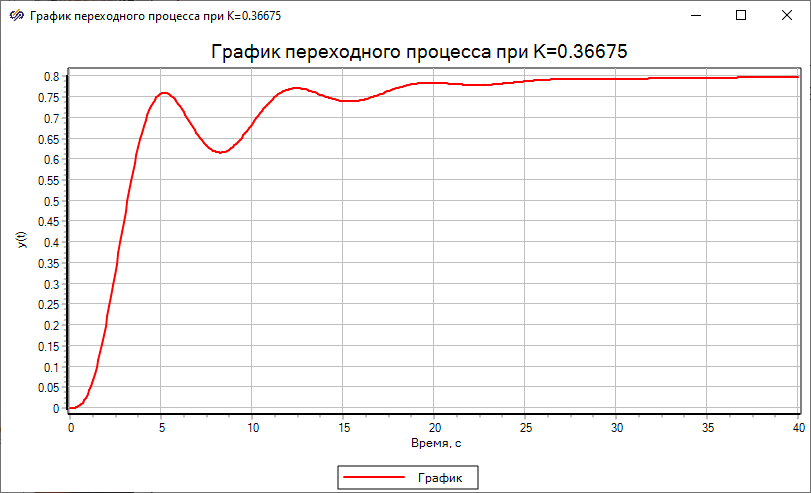
- при подаче ступенчатого воздействия перерегулирование отсутствует
- время переходного процесса не превышает 20 с
При выполнении лабораторной работы №1 использовался метод прямого моделирования, который позволил всего за три попытки определить значение скоростной эффективности регулятора равной "0.35", при котором переходной процесс в САР одновременно удовлетворял обоим вышеприведенным ограничениям.
При отсутствии рекомендаций по варьированию значений скоростной эффективности, поиск оптимального значения мог бы быть затруднен. При увеличении числа варьируемых параметров, стратегия поиска методом подбора становится не очевидной.
В SimInTech реализован блок Оптимизатор, который позволяет выполнить автоматизированный поиск таких значений варьируемых параметров САР, при которых динамические характеристики САР (и переходной процесс, в частности) удовлетворяют критериям оптимальности.
Последовательность действий для оптимизации
- Задать варьируемые параметры как глобальные переменные (точнее - сигнал проекта), используя соответствующие интерфейсные процедуры
- Сформировать локальные критерии оптимизации, которые необходимы для решения основной задачи оптимизации
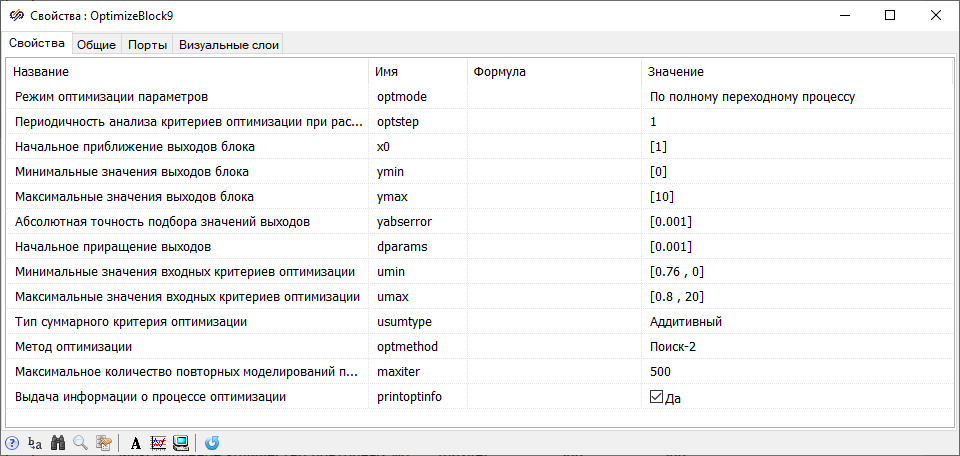
- Поместить на схему блок Оптимизатор и ввести в его настройках
требуемые данные, включая:
- имена варьируемых параметров, пределы их изменения и погрешность расчета
- имена локальных критериев и допустимые пределы их значений
- расчетный метод оптимизации и его настройки
- Запустить проект на расчет
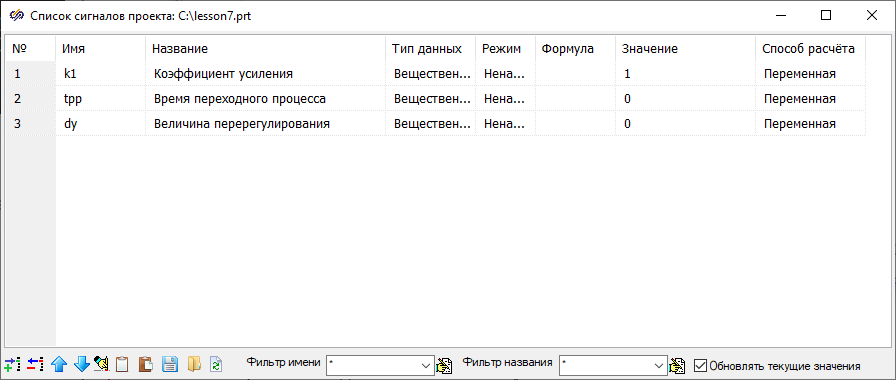
Задание варьируемого параметра как глобального сигнала проекта

Список сигналов проекта позволяет создать список переменных, которые используются в процессе моделирования и обеспечивают доступ к данным переменным по их имени.
В окне Список сигналов проекта нажать кнопку Добавить сигнал для добавления нового сигнала с возможностью изменения его параметров.
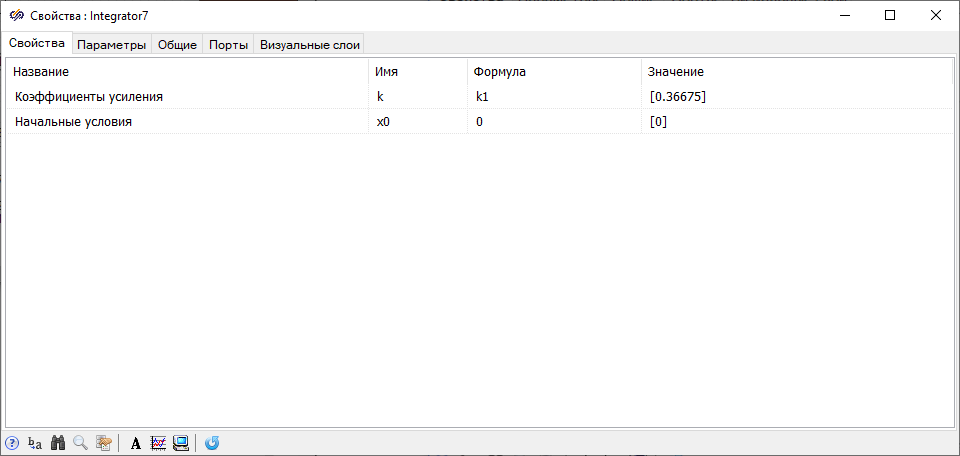
- "k1" – коэффициент усиления - параметр, который оптимизируется в задаче
- "tpp" – время переходного процесса
- "dy" – величина перерегулирования
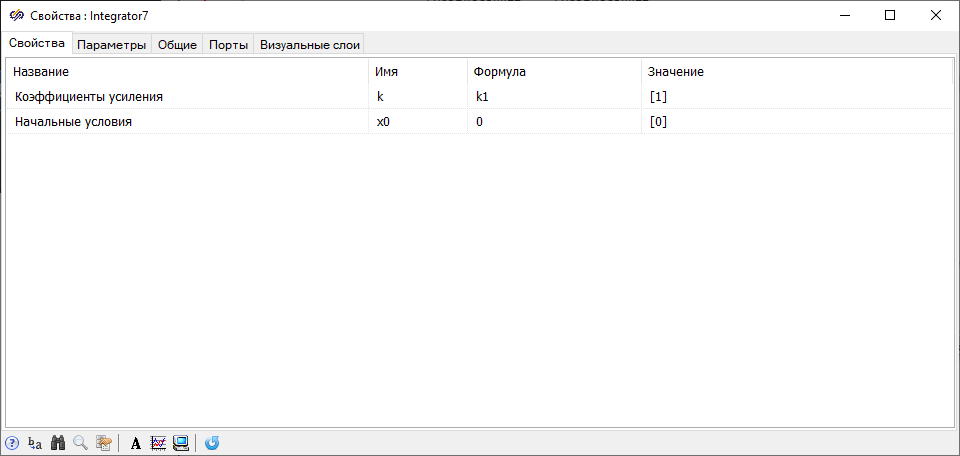
Переменные данного списка могут быть использованы в качестве свойств блоков расчетной схемы.
Расчет локальных критериев оптимизации
Для расчета параметров переходного процесса используется субмодель, в которой будет создана расчетная схема.
Поместить на схему блок Субмодель из вкладки Субструктуры и зайти в субмодель. В рабочую область блока Субмодель поместить два блока Порт входа. Рекомендуется поместить их с левой стороны один под другим, тогда их порядок будет соответствовать порядку входов блока схеме верхнего уровня.
- 1 блок Абсолютное значение из вкладки Операторы
- 1 блок Часы из вкладки Источники
- 1 блок Ключ-3 из вкладки Ключи
- 1 блок Задержка на шаг интегрирования из вкладки Нелинейные
- 1 блок Нижний или верхний передел из вкладки Нелинейные
- 2 блока Порт выхода из вкладки Субструктуры
- 2 блока Запись в список сигналов из вкладки Сигналы
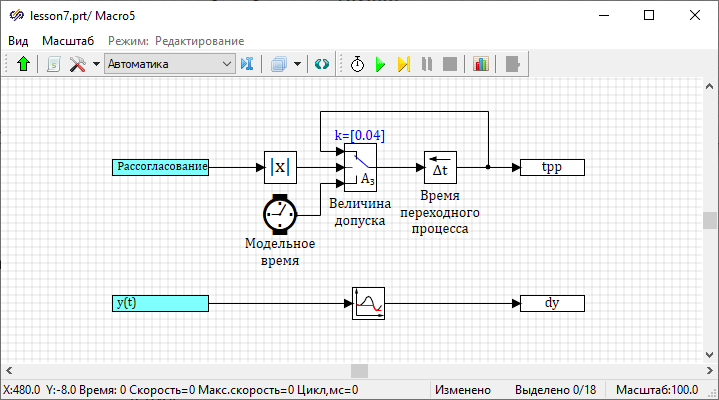
- В свойствах блока с подписью "Величина допуска" (Ключ-3) в строке "Значения уставок" ввести значение равное "0.04", что соответствует 5%-й "трубке" от будущего установившегося значения
- В свойствах блока Нижний или верхний передел установить "Тип операции" – "Максимум". Данный блок обеспечит запись максимального значения величины, полученной из входного порта в список сигналов
- Двойным нажатием по блокам Порт входа необходимо вызвать окно Порт субмодели и в поле "Имена портов субмодели" задать названия портов "Рассогласование" и "y(t)" в соответствии с рисунком (Рисунок 6)
- В свойствах блоков Запись в список сигналов задать свойство "Имена сигналов" равным "tpp" и "dy" в соответствии с рисунком (Рисунок 6)
- На средний (логический) входной порт блока Ключ-3 (величина допуска) подается модуль сигнала рассогласования
- Если этот сигнал больше уставки (5 % от 0.8), то на выход блока Ключ-3 передается сигнал с третьего (нижнего) входного порта, т.е. текущее модельное время
- Если управляющий сигнал (на среднем входном порту) меньше уставки, то на выход блока Ключ-3 передается сигнал с первого (верхнего) входного порта, т.е. тот же сигнал, но задержанный на один шаг интегрирования
- Задержку на шаг интегрирования осуществляет блок с подписью "Время переходного процесса" (блок Задержка на шаг интегрирования из вкладки Нелинейные)
Таким образом после завершения расчета в переменных "tpp" и "dy" будет находиться значение времени переходного процесса и максимальное значение выхода из блока с подписью "W2(s)".
Выйти из рабочей области субмодели, выполнив двойное нажатие мышью на свободное пространство окна проекта или нажав кнопку Возврат из субмодели.
Настройка блока "Оптимизатор"
- 2 блока Чтение из списка сигналов из вкладки Сигналы
- 1 блок Запись в список сигналов из вкладки Сигналы
- 1 блок Мультиплексор из вкладки Векторные
- 1 блок Оптимизатор из вкладки Анализ и оптимизация
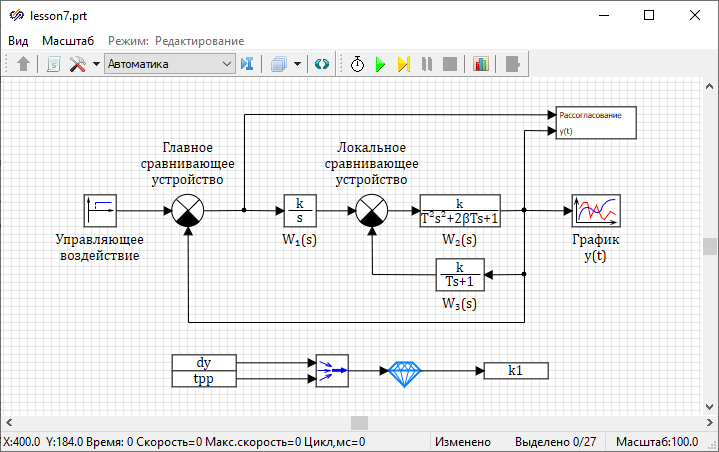
Произвести настройку блоков Чтение из списка сигналов и Запись в список сигналов согласно рисунку (Рисунок 8).
Описание работы схемы: два сигнала, максимальная величина значения – "dy", и время переходного процесса – "tpp", рассчитанные в блоке Субмодель, упаковываются в вектор и передаются в блок Оптимизатор, данный блок рассчитывает значение, передаваемое в сигнал "k1", который, в свою очередь определяет свойство "Коэффициент усиления" в блоке с подписью "W1(s)", и должен обеспечить заданную характеристику переходного процесса.
В качестве параметров оптимизации используем время переходного процесса и максимальное значение в течении переходного процесса, соответственно оптимизация должна рассчитываться по всему переходному процессу.
Блок Оптимизатор может вычислять оптимальные значения и во время переходного процесса, но для этого необходимо использовать критерии оптимизации, рассчитываемые в каждый момент времени.
Расчет оптимального регулятора
При нажатии на кнопку Пуск в главном окне происходит запуск расчета. Необходимо обратить внимание, что при добавленном блоке оптимизации в режиме "По полному переходному процессу", модель в SimInTech рассчитывается не один раз в динамике, а несколько повторных раз до получения оптимального результата. В данном случае в окне сообщений, в нижней части схемного окна появляется информация об оптимизированном параметре и достигнутых критериях оптимизации.
Заключение
Демонстрационно-ознакомительная задача на этом завершена. Необходимо сохранить проект.