Анализ динамики линейных и линеаризованных САР, описываемых в переменных "Вход – Выход"
Лабораторная работа №1 по курсу "Управление в технических системах"
Введение
Высокие темпы развития аппаратных средств вычислительной техники в последние 15-20 лет обеспечили реальную возможность создания эффективных САПР, включая как традиционные средства САПР конструкторского направления (AutoCAD, КОМПАС и другие), так и "интеллектуальные" САПР, предназначенные для автоматизации наукоемких расчетов в обоснование основных показателей проектируемой установки, таких как безопасность, надежность и другие.
К разряду "интеллектуальных" САПР относятся программно-инструментальные средства или системы автоматизации динамических расчетов (средства АДР, или САДР). Наиболее важным признаком автоматизации является удобство "сборки" из разнообразных модулей, каждый из которых решает ту или иную небольшую задачу, некоторой единой системы, решающей задачу более высокого уровня. В идеале полная программа расчета динамики – это многомерная сеть, в узлы которой автоматически подаются нужные программные модули из библиотеки моделирующих программ. В ней предусмотрена возможность расширения, замены и улучшения общей структуры и отдельных модулей.
Программно-инструментальные средства автоматизации динамических расчетов сложных технических систем позволяют: в десятки раз сократить время от разработки математической модели объекта до получения результатов моделирования; повысить надежность результатов расчетов; оптимизировать полученные решения, используя многовариантный анализ, и многое другое. Средства АДР дают возможность Проектировщику сосредоточиться на решении основной задачи и не отвлекаться на разработку программ и алгоритмов. Именно в системах АДР появляется реальная возможность ясного вмешательства в те или иные фрагменты процесса счета и его изменения в соответствии с желанием Исследователя (в том числе и в режиме реального времени).
Наиболее общим подходом к созданию систем АДР, охватывающих широкий спектр областей применения (от технических до организационных), следует считать развитие методов структурного моделирования. К настоящему времени за рубежом разработан ряд программно-инструментальных средств для моделирования и анализа на ЭВМ динамических систем, в основе которых лежит метод структурного моделирования. Большинство из них представляет собой универсальные программные комплексы (ПК) с библиотеками типовых модулей общетехнического профиля (наиболее известные из них – SimuLink, VisSim, LabVIEW, Modelica и другие.).
Из отечественных программно-инструментальных средств АДР наиболее развитым является SimInTech (на базе технологии программного комплекса "Моделирование в технических устройствах" (ПК "МВТУ"), созданной в МГТУ им. Н.Э. Баумана на кафедре Э-7 "Ядерные реакторы и установки").
Эффективность использования SimInTech показана как в учебном процессе МГТУ им. Н.Э. Баумана и ряда других технических университетов (при выполнении виртуальных лабораторных работ, в курсовом и дипломном проектировании), так и в ряде реальных проектных разработок.
Цель работы
- Ознакомиться с возможностями SimInTech
- Освоить процедуры формирования структурной схемы САР
- Освоить процедуры формирования модели, выбора метода и параметров интегрирования, ввода свойств блоков, вывода данных расчета
- Сформировать структурную схему САР объекта управления, описываемой в переменных "вход-выход"
- Определить устойчивость САР прямым моделированием переходных процессов при подаче управляющего и возмущающего воздействий
Краткое описание процедур работы в SimInTech
В данном разделе рассматриваются основные процедуры работы, освоение которых является обязательным условием для самостоятельной работы в SimInTech.
- Используя палитру блоков, сформировать схему модели в окне проекта с использованием необходимых блоков
- Соединить блоки линиями связи
- Задать свойства блоков на структурной схеме
- Задать конечное время интегрирования, выбрать необходимый метод интегрирования и настроить другие параметры расчета
- Сохранить проект
- Запустить проект на расчет. Проанализировать результаты моделирования
Динамика САР ядерного реактора
Для ознакомления с функциональными возможностями SimInTech рассматривается демонстрационный пример "Релейный регулятор для САР ядерного реактора".
Необходимо запустить SimInTech. Нажатием на кнопку Открыть вызвать окно Загрузка проекта со списком файлов, имеющих расширение ".prt".

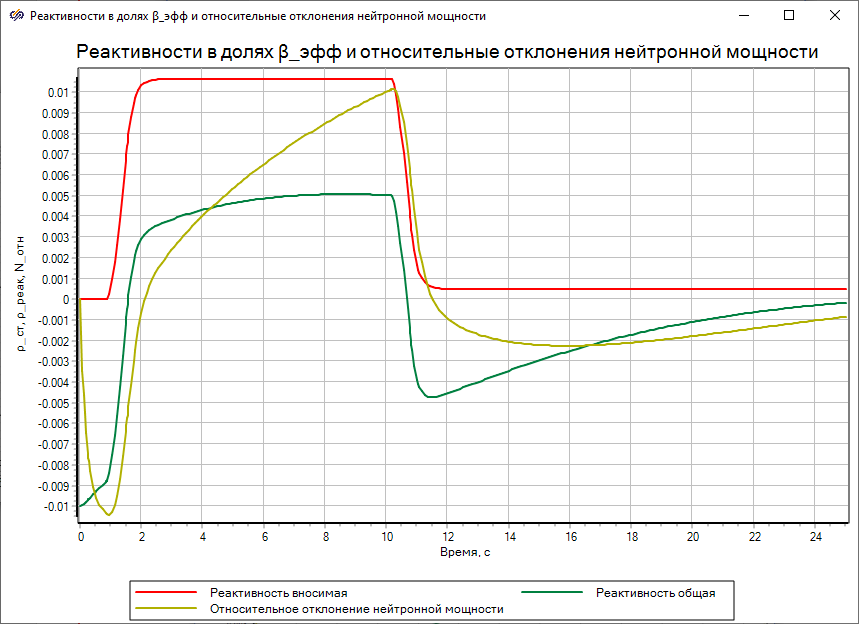
Рассмотреть САР, в которой управляющее воздействие от блока Ступенька с подписью "Задатчик мощности" равно нулю, то есть которая выведена из состояния равновесия (начальная реактивность температурной обратной связи ненулевая, а равна "1%" от βэфф). Левой кнопкой мыши выполнить нажатие на кнопку Инициализация в панели инструментов. Таким образом задача будет инициализирована (в нижнем левом углу окна появится сообщение о готовности проекта к старту: Старт). Выполнить нажатие на кнопку Пуск левой кнопкой мыши. Начнется процесс моделирования.
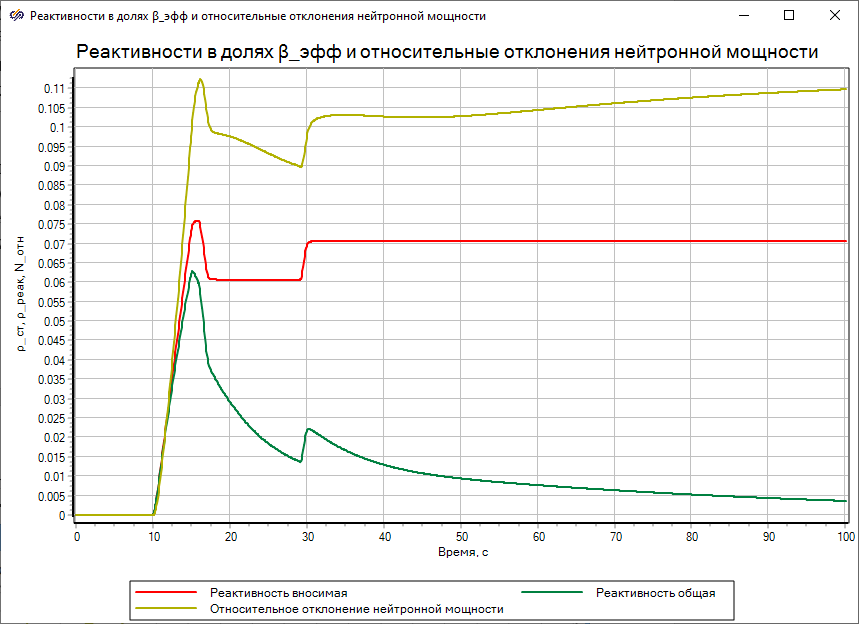
Рассмотреть неавтономную САР, которая десять секунд находится в равновесии, а после на нее подается управляющее воздействие, которое должно перевести ядерный реактор на повышенный уровень мощности "+10 %".
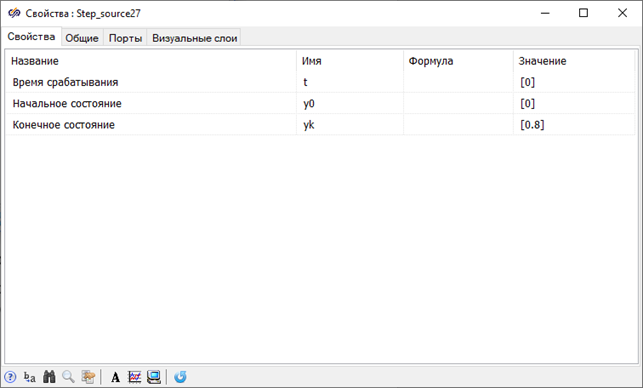
Двойным нажатием левой кнопкой мыши на блок Инерционное звено 1-го порядка с подписью "Обратная связь" вызвать окно Свойства и изменить значение "Начальное условие" на "0". Открыть окно Свойства блока с подписью "Задатчик мощности" и установить в строки с именами "t", "y0", "yk" значения "10", "0" и "0.1" соответственно. Таким образом на вход блока Сравнивающее устройство будет подано ступенчатое воздействие равное "0.1" через десять секунд после начала расчета.
Нажать на кнопку Параметры расчёта и задать параметр "Конечное время расчёта" равным "100". Запустить проект на расчет.
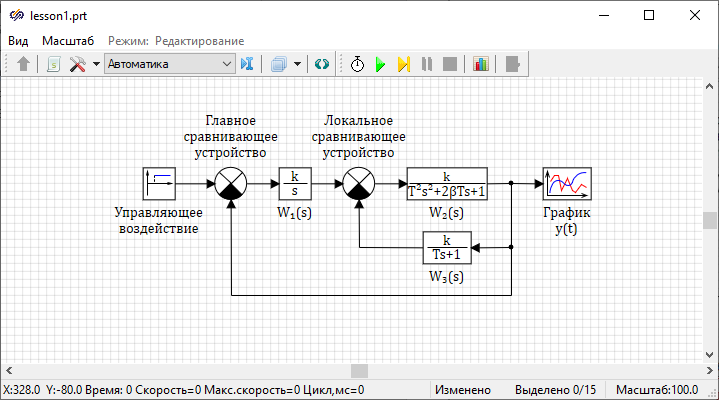
Для отображения результатов расчета использована векторизованная обработка сигналов: сигналы реактивностей регулирующего стержня и реактора преобразуются в вектор с помощью блока Мультиплексор, а затем поэлементно умножаются на коэффициент блока Усилитель. Таким образом сигналы векторно нормированы на значение эффективной доли запаздывающих нейтронов βэфф.
Блок Временной график в данной задаче имеет два входа (первый вход – векторный, а второй – скалярный). С подробным описанием работы других блоков можно ознакомиться в справочной системе SimInTech.
После ознакомления с принципом работы данной схемы необходимо закрыть окно проекта без сохранения изменений. При необходимости можно ознакомиться с другими демонстрационными примерами в папке "Demo" директории установки SimInTech.
Демонстрационно-ознакомительная задача
- при подаче ступенчатого воздействия перерегулирование отсутствует
- время переходного процесса не превышает 20 с
Формирование структурной схемы
- 1 блок Ступенька из вкладки Источники
- 2 блока Сравнивающее устройство из вкладки Операторы
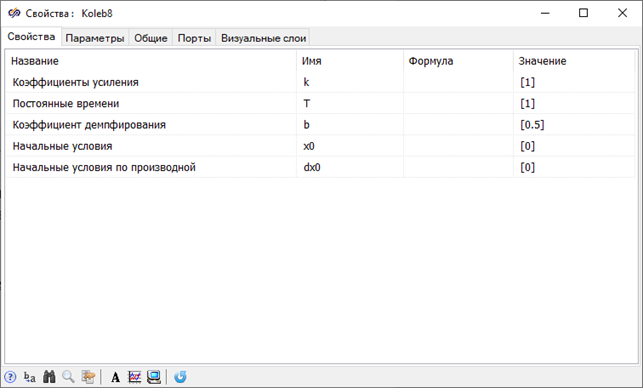
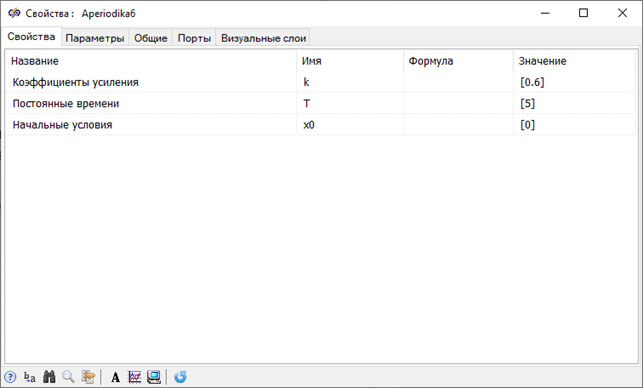
- 1 блок Интегратор, 1 блок Инерционное звено 1-го порядка и 1 блок Колебательное звено из вкладки Динамические
- 1 блок Временной график из вкладки Вывод данных
Разместить блоки в окне проекта и задать им подписи согласно рисунку (Рисунок 8).
Для задания подписей к блокам необходимо выделить нужный блок. При выделении блока появляется дополнительное окно подписи под блоком. После двойного нажатия левой кнопки мыши на окну подписи, появится курсор для ввода подписи. Задать подписи блоков.
Соединение блоков на схеме
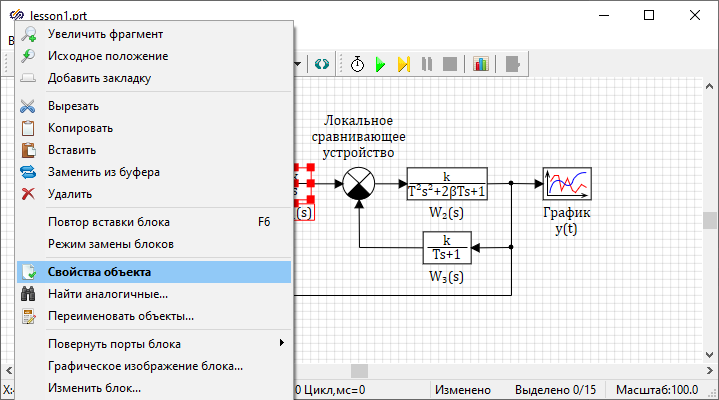
Нажать на выходной порт блока с подписью "Управляющее воздействие" и, отпустив кнопку, протянуть линию связи к входному порту блока с подписью "Главное сравнивающее устройство" и нажать на него левой кнопкой мыши. Для осуществления поворота линии связи необходимо нажать левой кнопкой мыши по свободному пространству окна проекта, где необходимо выполнить поворот и продолжить построение линии связи.
Изменить расположение портов блока с подписью "W3(s)". Двойным нажатием левой кнопкой мыши по блоку вызвать окно Свойства. В пункте Порты выбрать необходимой порт и установить его расположение на блоке согласно рисунку (Рисунок 8).
Повторить соединение линиями связи для остальных блоков структурной схемы.
При необходимости подключения входа блока к существующей линии связи необходимо провести линию связи от входа блока до необходимой линии связи и нажать на нее левой кнопкой мыши для подключения. Для удаления линии связи необходимо выделить данную линию и нажать кнопку "Delete".
Сохранить проект. Для этого открыть меню Файл в главном окне и выбрать пункт Сохранить проект как. В появившемся окне задать название проекта (например, "lesson1"). Нажать на кнопку Сохранить.
Для масштабирования структурной схемы по окну проекта необходимо зайти в меню Масштаб и выбрать пункт "Показать все".
Задание свойств блоков
Открыть окно Свойства блока с подписью "W1(s)" и в строке "Коэффициенты усиления" задать значение равным "1".
Двойным нажатием по блоку Временной график открыть окно с заголовком График. Задать необходимый размер окна.
Сохранить проект.
Настройка параметров расчета
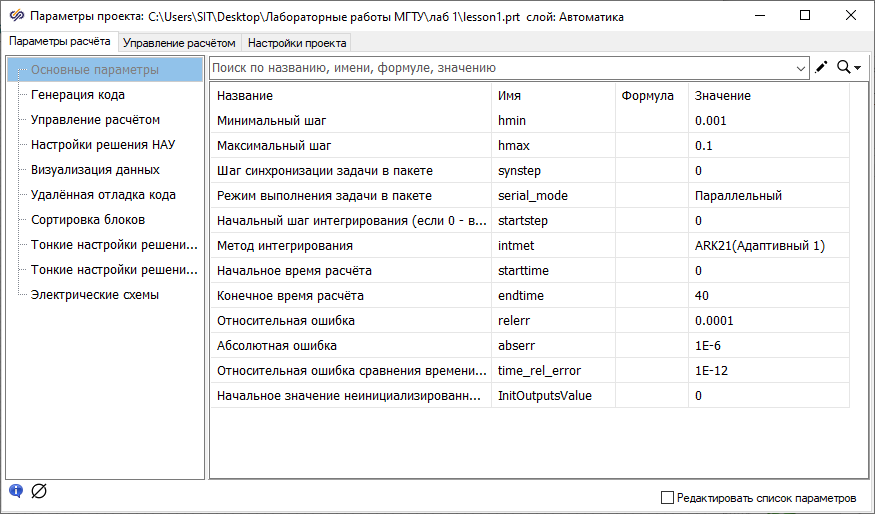
Нажатием на кнопку Параметры расчёта открыть окно Параметры проекта (Рисунок 13).
- Параметры расчёта – параметры математического ядра, используемые при расчете, зависят от выбранного решателя и типа проекта
- Управление расчетом содержит области:
- Синхронизация – настройка синхронизации времени расчета с реальным временем
- Рестарт – параметры сохранения и запуска исходных состояний расчетной модели (параметры проекта сохраняются в виде файла с расширением ".rst")
- Настройка проекта содержит области:
- База данных – структурированная файловая база данных, содержащая в себе сигналы, используемые в одном или нескольких проектах (представляет из себя файл с расширением ".db")
- Вид – параметры внешнего вида расчетных схем при моделировании и редактировании
- Настройки разработчика – дополнительные настройки внешних библиотек
- "Метод интегрирования" = "Адаптивный 1"
- "Конечное время расчёта" = "40"
- "Минимальный шаг" = "0.001"
- "Максимальный шаг" = "0.1"
Запуск моделирования и построение графика
Запустить проект на расчет нажатием на кнопку Пуск. По окончании расчета появится сообщения в нижней части она проекта: Предупреждение: Заданная точность не достигается.
Открыть окно Параметры проекта, задать параметр "Минимальный шаг" равный "1e-10" и повторить процесс моделирования.
При изменении минимального шага расчета внешний вид переходного процесса не изменился, так как при первоначальном минимальном шаге интегрирования заданная точность не обеспечивалась только на первом шаге моделирования. Сообщение о точности можно проигнорировать.
- На вкладке Графики и оси задать подписи осям графика в полях "Название оси" согласно рисунку (Рисунок 14).
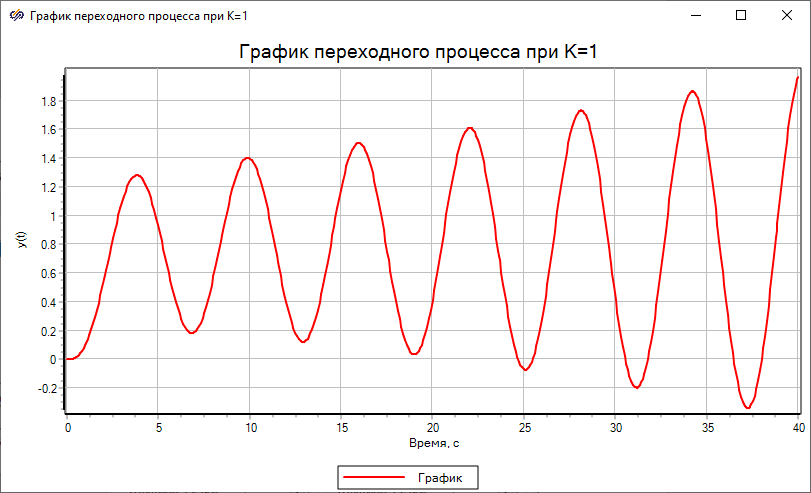
- На вкладке Общие задать название графика "График переходного процесса при К=1" в поле "Заголовок".
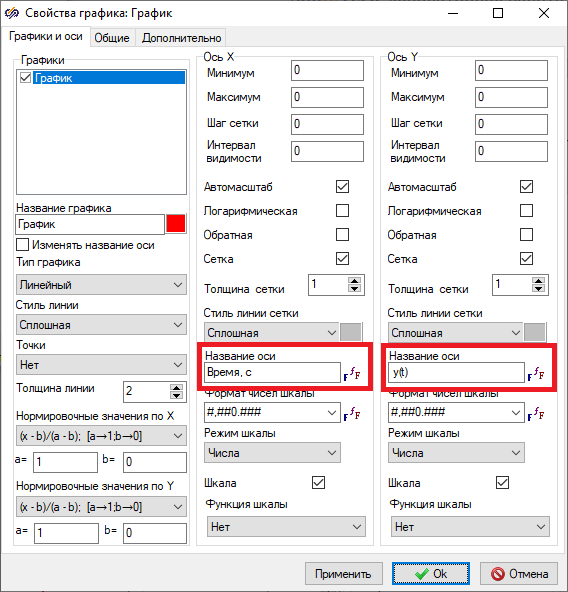
При необходимости в окне Свойства графика можно задать: тип графика, цвет и стиль линии, цвет фона, масштабы и нормировочные значения по обеим осям.
Чтобы закрыть окно Свойства графика необходимо нажать на кнопку Ok, при этом все изменения будут сохранены. Сохранить проект.
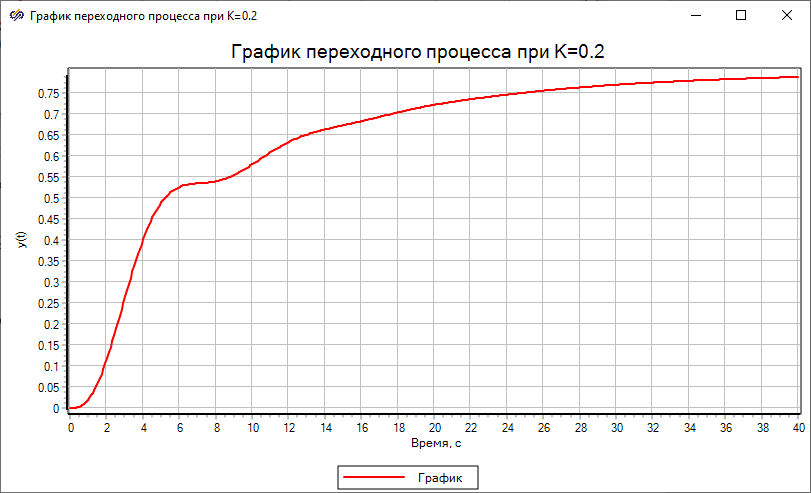
В блоке Интегратор задать свойство "Коэффициент усиления" равным "0.2". Запустить проект на расчет.
Данные расчета свидетельствуют, что перерегулирование отсутствует, но время переходного процесса значительно превышает необходимые критерии.
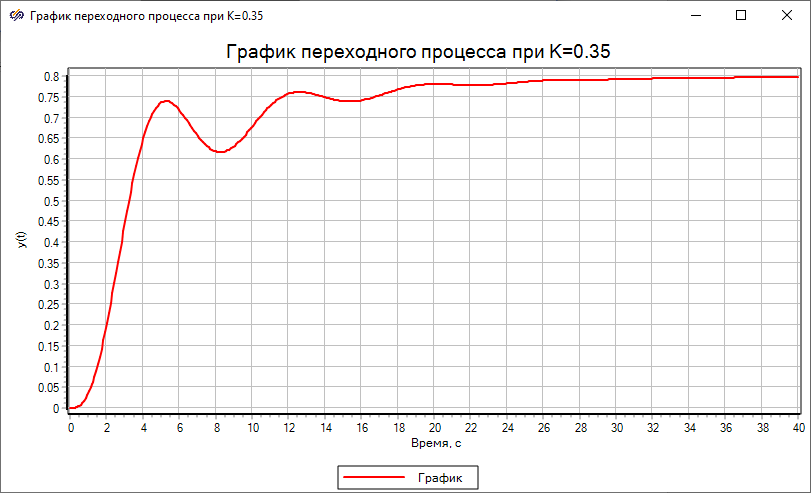
В блоке Интегратор задать свойство "Коэффициент усиления" равным "0.35". Запустить проект на расчет.
Данные расчета свидетельствуют, что перерегулирование отсутствует и время переходного процесса соответствует необходимым критериям.
Самостоятельная работа
Сформировать структурную схему простейшей математической модели динамики САР ядерного реактора (САР ЯР) и определить динамические свойства САР прямым моделированием переходных процессов при подаче управляющих и возмущающих воздействий.
- - нормированное отклонение управляющего напряжения в обмотке возбуждения электродвигателя
- - нормированное отклонение плотности нейтронов (мощности или нейтронного потока)
- ρст(t), ρвозм(t), ρос(t) - реактивность, вносимая в реактор регулирующим стержнем, внешним возмущающим воздействием, местной (внутренней) обратной связью, соответственно
- - рассогласование (ошибка)
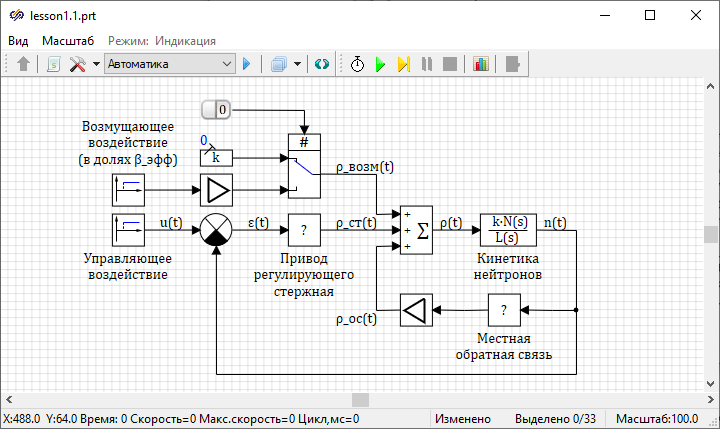
Для изображения блока с подписью Кинетика нейтронов использована пиктограмма блока Передаточная функция общего вида из вкладки Динамические, что можно рассматривать как подсказку о том, какой типовой блок описывает кинетику нейтронов в этой задаче.
На схеме не изображен ряд блоков, например, блоков графического отображения результатов расчета и блок преобразования сигналов. Каких блоков из библиотек Вывод данных, Операторы, Функции не хватает, необходимо определить самостоятельно.
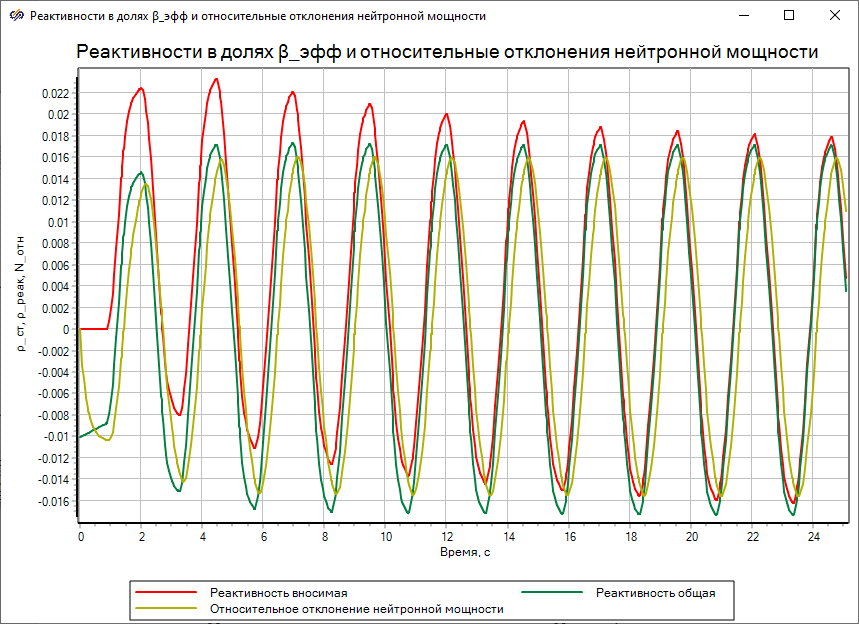
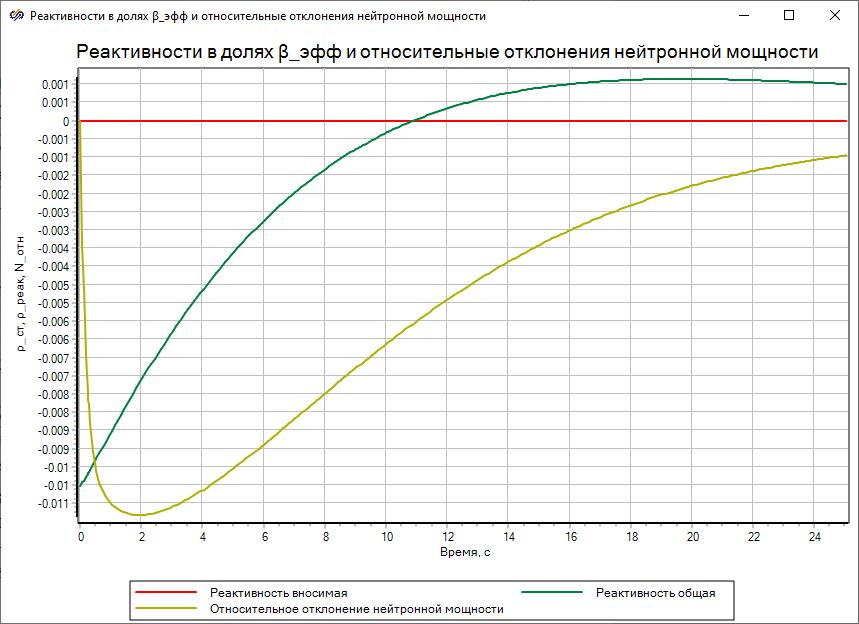
Необходимо построить на разных графиках зависимости величин n(t), T(t), d[pст(t)/βэфф]/dt, а также на одном графике реактивности pст(t), pвозм(t), pос(t) в долях βэфф в зависимости от модельного времени. Самостоятельно найти способы формирования и отображения этих динамических переменных.
Известно, что переход к нормированным отклонениям плотности нейтронов (что эквивалентно нормированным отклонениям мощности или нейтронного потока) и последующая линеаризация дифференциального уравнения для плотности нейтронов, позволяют представить математическую модель точечной кинетики нейтронов с одной эффективной группой запаздывающих нейтронов в следующем виде:
- – эффективная доля запаздывающих нейтронов
- – время жизни мгновенных нейтронов
- – постоянная распада ядер-предшественников запаздывающих нейтронов
- – нормированные отклонения концентрации ядер-предшественников запаздывающих нейтронов
Блок с подписью "Местная обратная связь", определяется отрицательным температурным эффектом реактивности и описывается следующими уравнениями:
- – температурный коэффициент реактивности
- – стационарная температура топлива в активной зоне и нормированное отклонение температуры топлива в активной зоне от стационара, соответственно
- – постоянная времени (инерционность) топлива в активной зоне
- – безразмерный коэффициент
Блок с подписью "Привод регулирующего стержня" состоит из электродвигателя постоянного тока, редуктора, муфт, преобразователя движения, непосредственно регулирующего стержня и других элементов, однако для упрощения задачи все эти элементы объединены в одно звено.
Нестационарные процессы в блоке с подписью "Привод регулирующего стержня" описываются следующим дифференциальным уравнением:
- – коэффициент скоростной эффективности
- – постоянная времени
- Представить динамику САР в переменных "вход-выход" (в передаточных функциях), определив вид передаточных функций для всех блоков структурной схемы
- Подставить численные значения всех параметров и вычислить значения всех коэффициентов в полиномах числителей и знаменателей передаточных функций
- Используя освоенные процедуры работы в SimInTech, сформировать структурную схему динамики САР ядерного реактора
- При моделировании переходных процессов необходимо построить зависимости: n(t)/n0 , T(t), d(pr(t)/βeff)/dt, а также на одном графике реактивности в долях βeff в зависимости от времени. Найти способы формирования и отображения динамических переменных
- Представить сформированную структурную схему (с введенными значениями свойств звеньев, блоков формирования и отображения сигналов) преподавателю для проверки ее корректности
- Выполнить пробное моделирование переходного процесса в исходной САР при отсутствии возмущающего воздействия и подаче управляющего воздействия u(t) = 0.05×1(t) для конечного времени моделирования равного "40", и на основании вида переходных процессов сделать вывод об устойчивости исходной САР и найти способ последующей коррекции САР посредством изменения ее параметров
- Методом последовательных приближений достичь устойчивости САР
- Выполнить моделирование переходного процесса в скорректированной САР при отсутствии возмущающего воздействия и подаче управляющего воздействия u(t) = 0.05×1(t) для конечного времени моделирования равного "400", и на основании результатов расчета (по графикам) выполнить анализ поведения отображаемых динамических переменных
- Выполнить моделирование переходных процессов в скорректированной САР при отсутствии управляющего воздействия и подаче возмущающего воздействия pвозм(t) = 0.1·βeff·1(t) и pвозм(t) = 0.7·βeff·1(t) (поочередно) для конечного времени моделирования равным "100", и на основании результатов расчета выполнить анализ поведения отображаемых динамических переменных
- Выполнить моделирование переходных процессов при подаче вышеуказанных возмущающих воздействий для нового значения температурного коэффициента реактивности α = 5·10-5 K-1, и на основании результатов расчета выполнить анализ поведения отображаемых динамических переменных
- βeff = 0.006
- l = 0.072 c-1
- τdr = 0.2 с-1
- T0 = 700 K
- A = 0.75
- α = 1·10-4 K-1
Заключение
Демонстрационно-ознакомительная задача на этом завершена. Необходимо сохранить проект и сформировать отчет о проделанной работе.