Модуль конвертации модели Simulink в проект SimInTech
Модуль конвертации файлов проектов Simulink в SimInTech предназначен для быстрого создания нового проекта в SimInTech на основе ранее разработанной схемы в Simulink. Функционал модуля позволяет работать с загружаемыми файлами проектов Simulink в форматах *.mdl и *.slx версии MATLAB 5.0 и выше.
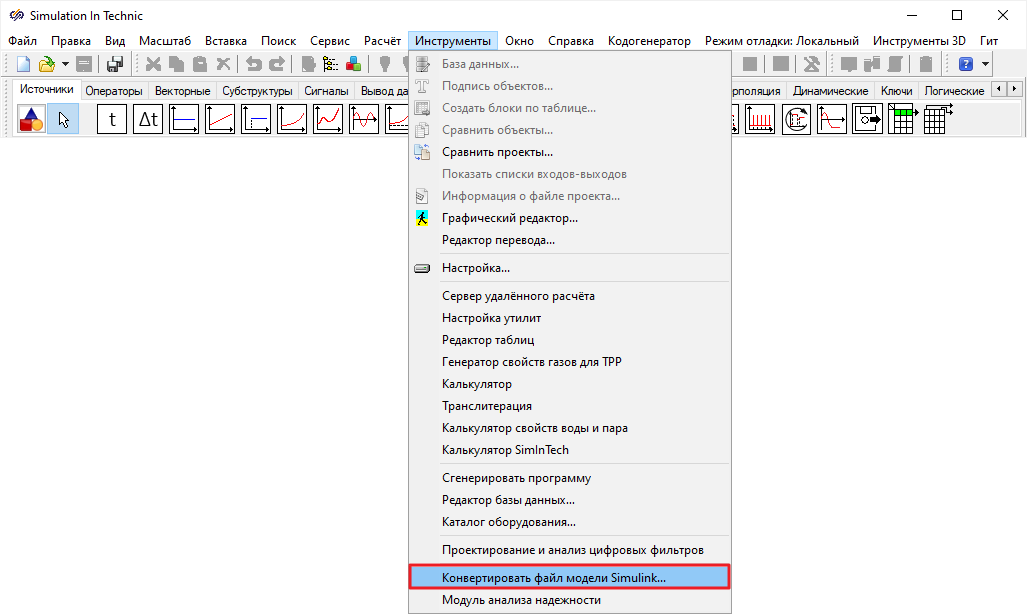
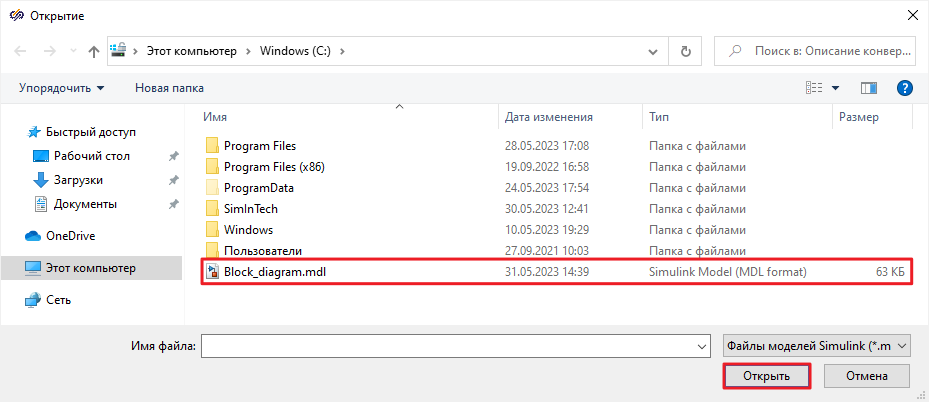
Конвертация осуществляется при помощи главного окна SimInTech: меню "Инструменты", кнопка "Конвертировать файл модели Simulink…".
Интерфейс
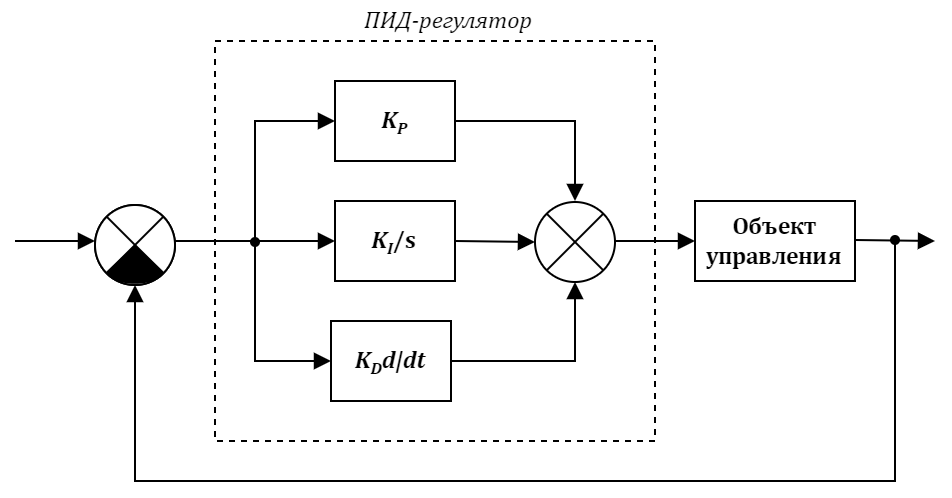
где KP, KI , KD – коэффициенты усиления пропорциональной, интегрирующей и дифференциальной составляющих регулятора соответственно.
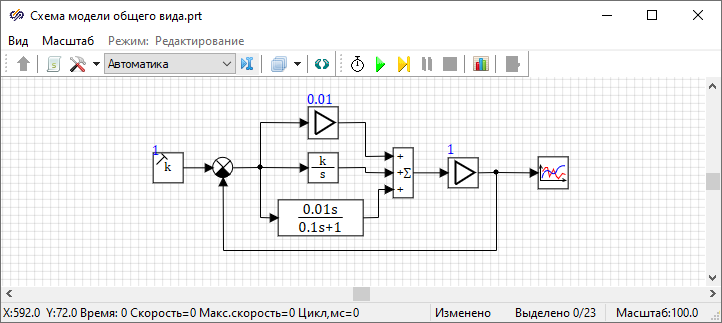
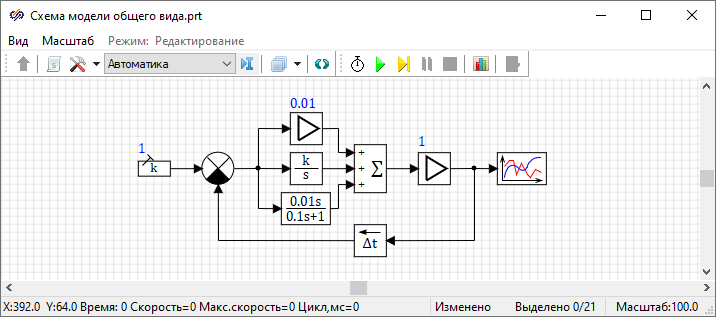
- 1 блок "Constant" из вкладки "Simulink/Commonly Used Block".
- 2 блока "Sum" из вкладки "Simulink/Commonly Used Block".
- 2 блока "Gain" из вкладки "Simulink/Commonly Used Block".
- 1 блок "integrator" из вкладки "Simulink/Commonly Used Block".
- 1 блок "Transfer Fcn" из вкладки "Simulink/Continuous".
- 1 блок "Scope" из вкладки "Simulink/Commonly Used Block".
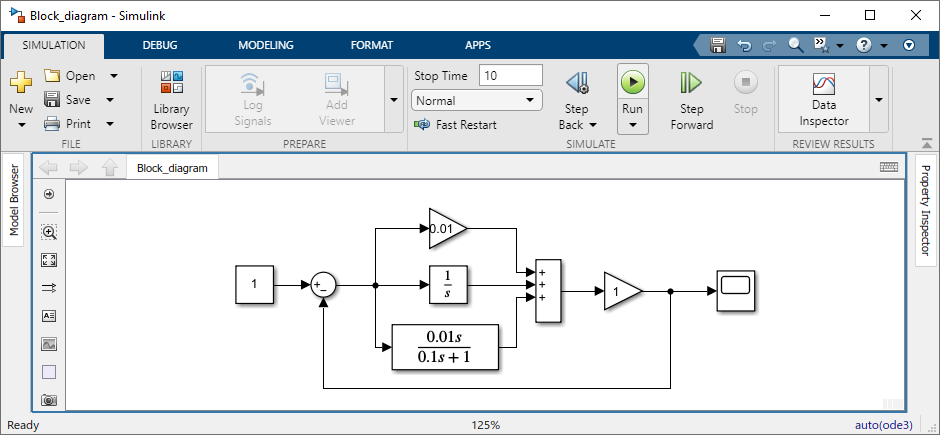
- Для блока "Gain", отвечающего за интегрирующую составляющую ПИД-регулятора, необходимо задать коэффициент усиления равным "0.01".
- Для блока "TransferFcn", отвечающего за дифференцирующую составляющую ПИД-регулятора, необходимо задать коэффициент при числителе равным "[0.01 0]", при знаменателе равным "[0.1 1]"
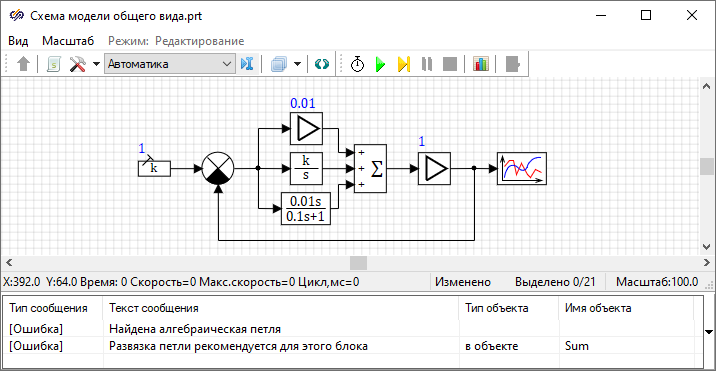
- Для первого блока "Sum", отвечающего за обратную связь, необходимо установить свойство "|+-" для создания отрицательной обратной связи.
- Для второго блока "Sum", отвечающего за суммирование всех составляющих ПИД-регулятора, необходимо установить свойство "+++|".
- Остальные свойства блоков оставить по умолчанию.
Установить шаг интегрирования "Fixed-step size" равным "0.001".
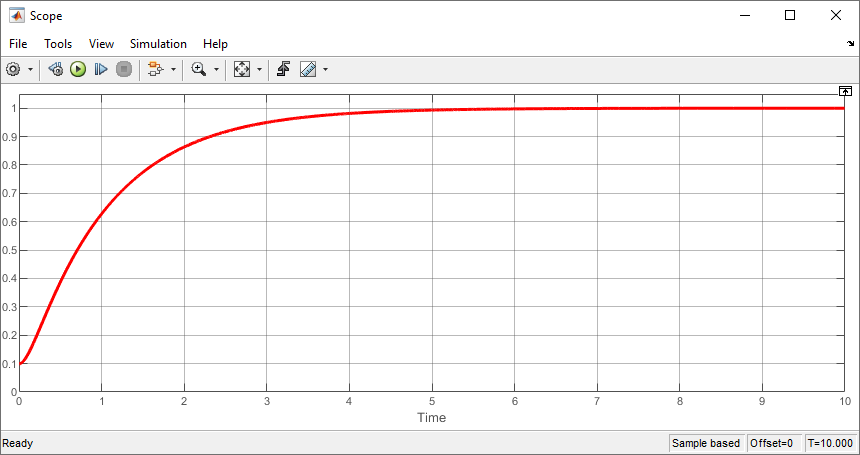
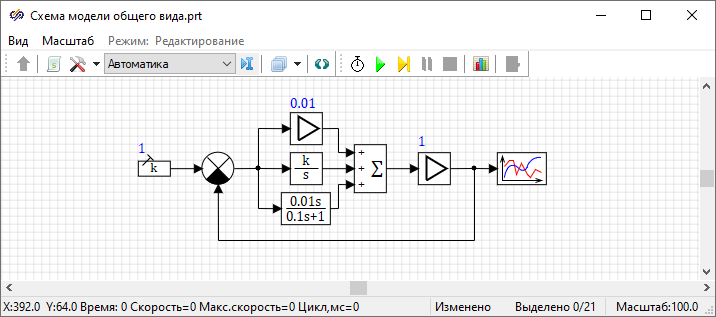
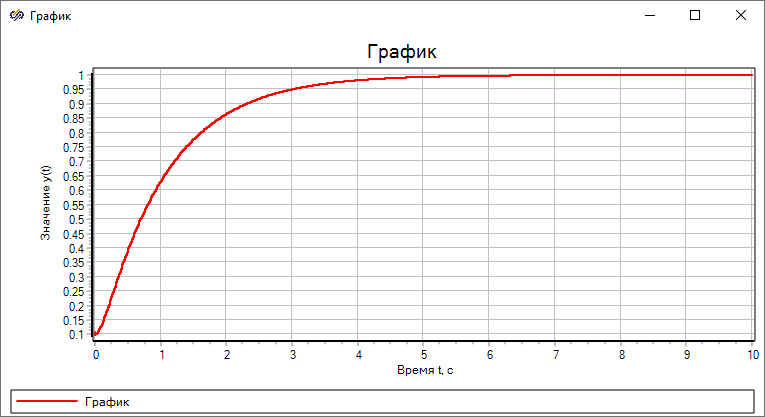
Таким образом, результаты моделирования спроектированного проекта в Simulink совпадают с результатами преобразованного проекта в SimInTech.
Блоки, конвертирующиеся из Simulink
На данный момент не все блоки из Simulink могут быть конвертированы в SimInTech. В представленном модуле доступны следующие преобразования:
| Блок в Simulink | Блок в SimInTech | |
|---|---|---|
| Источники | ||
| Clock | Часы | |
| Constant | Константа | |
| Step | Ступенька | |
| Sin | Синусоида | |
| Discrete Pulse Generator | Меандр | |
| Repeating Sequence Stair | Циклограмма | |
| Signal Generator | sine | Синусоида |
| square | Меандр | |
| sawtooth | Обратная пила | |
| random | Равномерный шум | |
| Операторы | ||
| Sum | Сумматор | |
| Product | Перемножитель | |
| Gain | Усилитель | |
| Abs | Абсолютное значение | |
| Signum | Знак | |
| Stop | Стоп-расчет | |
| Rounding | Целочисленные округления | |
| Radians to Degrees | Перевод радиан в градусы | |
| Degrees to Radians | Перевод градусов в радианы | |
| Complex to Magnitude-Angle | Комплексные модуль и угол | |
| Векторные | ||
| Mux, Concatenate | Мультиплексор | |
| Demux | Демультиплексор | |
| Selector | Выборка из вектора | |
| Dot Product | Скалярное произведение векторов | |
| Transpose | Транспонирование матрицы | |
| Субструктуры | ||
| SubSystem | Субмодель | |
| Inport | Порт входа | |
| Outport | Порт выхода | |
| Goto | В память | |
| From | Из памяти | |
| Ground | Уровень неподсоединенных портов | |
| Вывод данных | ||
| Scope | Временной график | |
| MultiPlot Graph | Временной график | |
| Функции | ||
| Sqrt | sqrt | Корень квадратный |
| rSqrt | Степенная функция | |
| signedSqrt | Язык программирования | |
| Math | sqrt | Корень квадратный |
| exp | Экспоненциальная функция | |
| log | Логарифм натуральный | |
| log10 | Логарифм десятичный | |
| square | Параболическая функция | |
| pow | Показательная функция с переменной амплитудой | |
| 10^u | Показательная функция | |
| 2^u | Показательная функция | |
| magnitude^2 | Комплексные модуль и угол | |
| reciprocal | Степенная функция | |
| Trigonometry | sin | Синусоидальная функция |
| cos | ||
| tan | ||
| asin | Арксинус | |
| acos | Арккосинус | |
| atan | Арктангенс | |
| atan2 | Арктангенс от двух аргументов | |
| sinh | Гиперболический синус | |
| cosh | Гиперболический косинус | |
| tanh | Гиперболический тангенс | |
| sincos | Синус с косинусом | |
| Нелинейные | ||
| Dead Zone | Линейное с зоной нечувствительности | |
| Relay | Релейное неоднозначное (гистерезис) | |
| Rate Limiter | Ограничитель скорости изменения сигнала | |
| MinMax Running Resettable | Нижний или верхний предел | |
| MinMax | Минимум по входам | |
| Backlash | Зазор | |
| Quantizer | Квантователь по уровню | |
| Saturate | Ограничитель | |
| Wrap To Zero | Сброс до нуля | |
| Memory, Unit Delay (SampleTime = -1) | Задержка на шаг интегрирования | |
| Интерполяция | ||
| Lookup | Интерполяция одномерной кривой | |
| Lookup2D | Интерполяция двумерной поверхности | |
| Lookup_n-D | 1-D | Интерполяция одномерной кривой |
| 2-D | Интерполяция двумерной поверхности | |
| 3-D | Интерполяция многомерной поверхности | |
| 4-D | Интерполяция многомерной поверхности | |
| Lookup Table Dynamic | Интерполяция одномерной кривой | |
| Динамические | ||
| Fcn | Язык программирования | |
| S-Function | Язык программирования | |
| Integrator | Интегратор | |
| WrapState = "on" | Круговой интегратор | |
| LimitOutput = "on" | Интегратор с ограничением | |
| Delay | Идеальное транспортное запаздывание | |
| TransferFcn | Передаточная функция общего вида | |
| Derivative | Производная | |
| Initial Condition (IC) | Начальное состояние | |
| Ключи | ||
| Manual Switch | Ключ ручной перекидной | |
| Switch | Ключ-3 | |
| Multiport Switch | Коммутатор входных сигналов по номеру порта | |
| Логические | ||
| Logic | AND, NAND | Оператор И |
| OR, NOR | Оператор ИЛИ | |
| NOT | Оператор НЕ | |
| XOR | XOR | |
| NXOR | NOT XOR | |
| Relational Operator | == | Операция РАВНО |
| ~= | Операция НЕ РАВНО | |
| < | Операция МЕНЬШЕ | |
| <= | МЕНЬШЕ ИЛИ РАВНО | |
| >= | БОЛЬШЕ ИЛИ РАВНО | |
| > | Операция БОЛЬШЕ | |
| Compare To Constant | Сравнение с константой | |
| Compare To Zero | Сравнение с константой | |
| Дискретные | ||
| Unit Delay | Запаздывание на период квантования | |
| Zero-Order Hold | Экстраполятор | |
| Discrete Integrator | Дискретный интегратор | |
| Discrete Transfer Fcn | Дискретная передаточная ф-я общего вида | |
| Динамика ЛА | ||
| DCM2Ang | Перевод матрицы направляющих косинусов в углы поворота | |
| DCM2Quaternion | Перевод матрицы направляющих косинусов в кватернионы | |
| Quaternion2DCM | Перевод кватернионов в матрицу направляющих косинусов | |
| Quat2Ang | Перевод кватернионов в углы поворота | |
| Ang2DCM | Перевод углов поворота в матрицу направляющих косинусов | |
| Ang2Quat | Перевод углов поворота в кватернионы | |
| Вспомогательные блоки | ||
| Reshape | Пустая модель | |
| Terminator | Заглушка | |
| Display | Простой индикатор на линии | |
| Data Type Conversion | Пустая модель | |