Для управления второй задвижкой мы создадим алгоритм, который будет менять ее положение в зависимости от времени, прошедшего с начала расчета. Функция изменения будет задаваться блоком «Кусочно линейная» со вкладки «Источники».
Алгоритм формирования осуществляет сравнение текущего положения задвижки с заданным положением, полученным с помощью блока «Кусочно линейная» из закладки «Источники». В случае расхождения подается команда на открытие или закрытие задвижки.
Для снятия непрерывных включений и выключений задвижки используется релейное звено с зоной нечувствительности – блок «Релейное с зоной нечувствительности», который находится на вкладке «Нелинейные»: блок позволяет не посылать команду в том случае, когда отклонение положения находится в пределах заданной точности.
Схема алгоритма управления второй задвижкой приведена на следующем рисунке (Рисунок 1). В схеме данного алгоритма используются такие же блоки «Вход алгоритма» и «Выход алгоритма», какие мы использовали в алгоритме управления первой задвижкой.
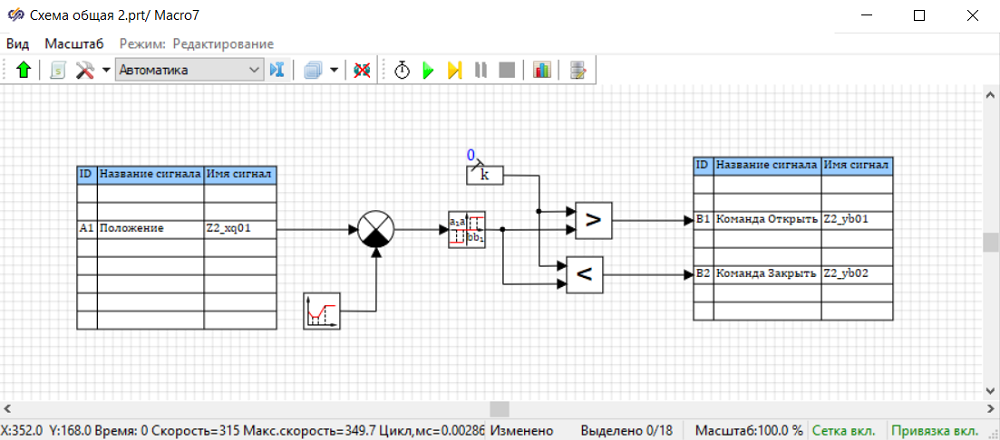
Рисунок 1. Схема управления второй задвижкой
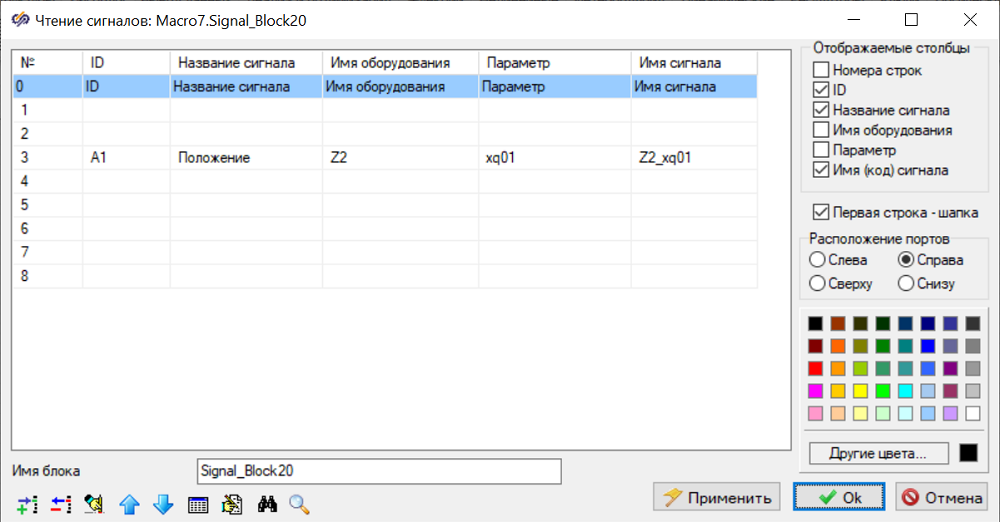
Рисунок 2. Параметры блока «Вход алгоритма»
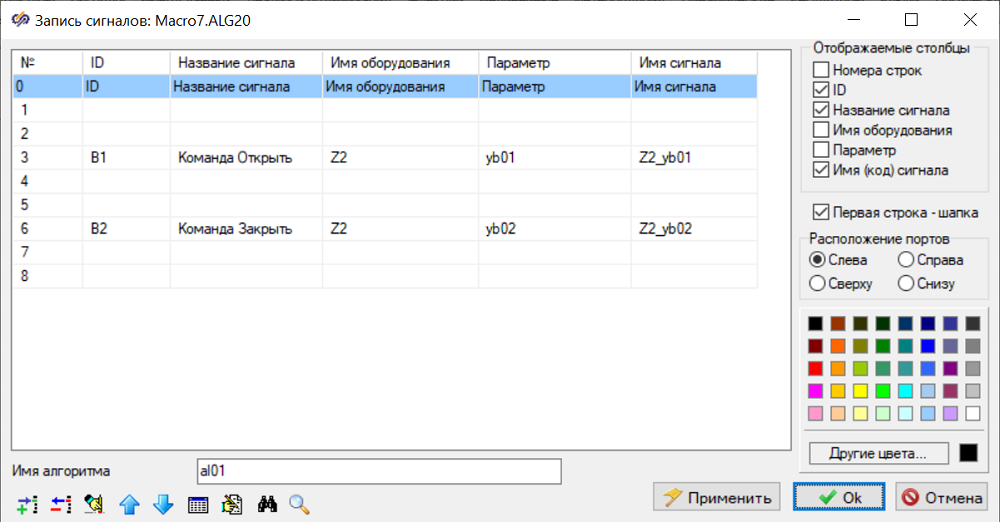
Рисунок 3. Параметры блока «Выход алгоритма»
Для блока «Релейное с зоной нечувствительности» задайте параметры, как на рисунке (Рисунок 4).
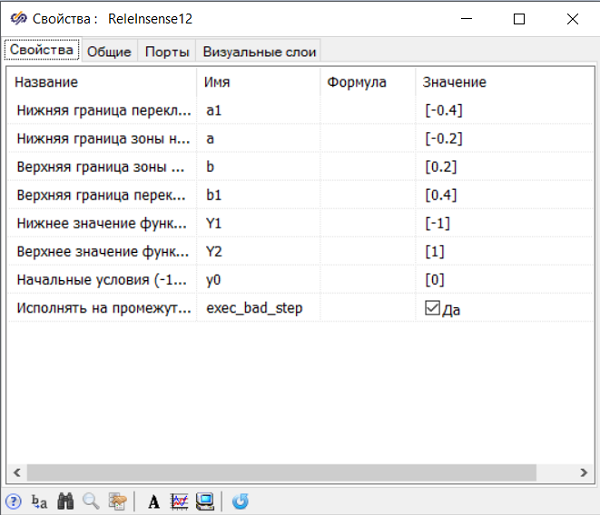
Рисунок 4. Свойства блока «Релейное с зоной нечувствительности»
Работает данное звено следующий образом: выход блока y(t) либо принимает одно из трех значений Y1, 0, Y2 либо не изменяется: y(t) = y(t – Δt), где y(t – Δt) – значение выхода на предыдущем шаге интегрирования (на предыдущем шаге численного расчета).
-
y(t) = Y1, если x(t) < a1 – реле переключается на нижнее значение при уменьшении входного воздействия ниже нижней границы переключения;
- y(t) = Y2, если x(t) > b1 – реле переключается на верхнее значение при увеличении входного воздействия выше верхней границы переключения;
- y(t) = 0, если a < x(t) < b – реле находится в нулевом положении если, значение входа попадает в зону нечувствительности;
- y(t) = y(t-Δt), если a1 ≤ x (t) ≤ a или b ≤ x (t) ≤ b2 – значение реле не изменяется, входное воздействие не пересекает зону переключения.
Заданные параметры блока (Рисунок 4) позволяют регулировать, или управлять положением задвижки с точностью ±1% от заданного значения.
Для задатчика положения второй задвижки используется кусочно-линейная зависимость от времени. Блок «Кусочно линейная» позволяет задать массив значений функции в различные моменты времени. Между заданными точками происходит линейное изменение значения выхода блока.
Зададим алгоритм для блока «Кусочно линейная»:
- в промежуток времени 0 – 50 секунд значение 10;
- в промежутке 50 – 100 секунд значение возрастает до 40.
- в промежутке 100 – 150 секунд значение 40;
- в промежутке 150 – 200 значение убывает до 20;
- в промежутке 200 – 250 (и далее) значение 20.
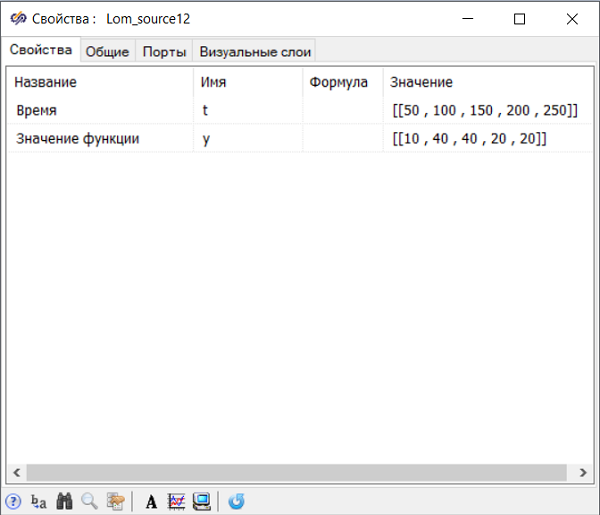
Рисунок 5. Свойства блока «Кусочно линейная»
