Приступим к созданию алгоритмов, формирующих команды управления для типового алгоритма вычисления положения:
- В файле проекта «Схема общая 2.prt» добавьте на схему два новых блока «Субмодель» (вкладка «Субструктуры») рядом с блоком «Субмодель» с подписью «БУЗ»;
- Создайте подписи для добавленных блоков. Для этого выделите блок, затем найдите в нижней
части блока прямоугольник и совершите двойной клик левой кнопкой мыши по нему. В результате
появится окно оперативного изменения подписи блока. Для первого блока создайте подпись
«Алгоритм управления задвижкой Z1», а для второго блока создайте подпись
«Алгоритм управления задвижкой Z2». После этого схема обретет вид (Рисунок 1);
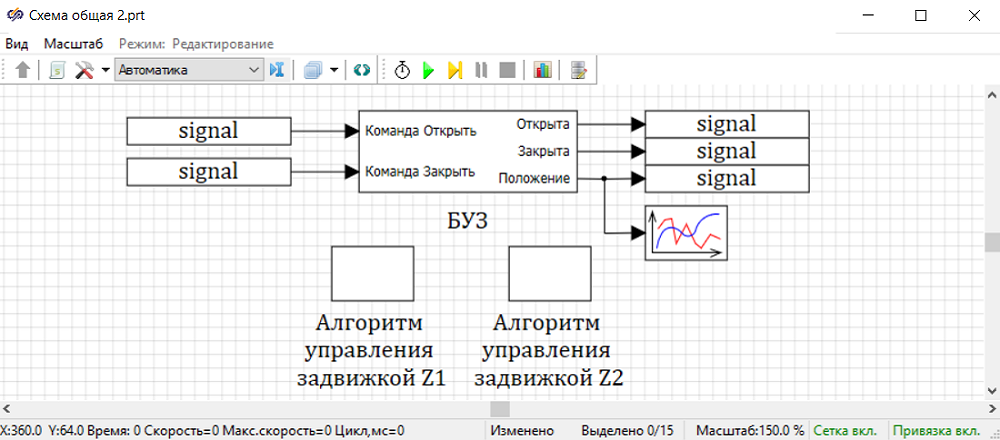
Рисунок 1. Вид схемного окна после добавления блоков "Субмодель"
- Войдите в блок «Субмодель» с подписью «Алгоритм управления задвижкой Z1» и поместите на схему блок «Вход Алгоритма» со вкладки «Сигналы». Блок «Вход алгоритма» позволяет получать значение сразу нескольких переменных из списка сигналов проекта или из базы данных;
- Поместите на схему блок «Выход Алгоритма». Данный блок позволяет записывать в базу
данных значение ранее занесенных сигналов, но также и создавать новые сигналы. После
добавления на схему блоков она должна выглядеть следующим образом (Рисунок 2).
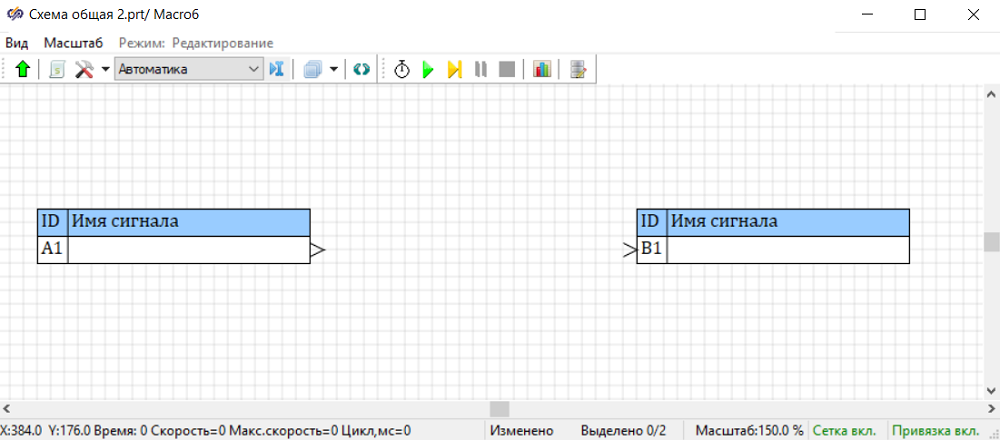
Рисунок 2. Схема с алгоритма с добавленными блоками «Вход алгоритма» и «Выход алгоритма»
