Требуется разработать модель алгоритма управления электродвигателем, с помощью которого будет обеспечиваться вращение, реверс и торможение двигателя.
В режиме вращения должны быть замкнуты контакторы с подписями «KM2», «KM3» и «KM5» для включения якорной цепи к источнику питания в прямом направлении. Остальные контакторы должны быть разомкнуты.
В режиме реверса должны быть замкнуты контакторы с подписями «KM1», «KM4» и «KM5» для включения якорной цепи к источнику питания в обратном направлении. Остальные контакторы должны быть разомкнуты.
В режиме торможения должен быть разомкнут контактор с подписью «KM5» для отключения электродвигателя от источника питания и замкнут контактор с подписью «KM6» для подключения якорной цепи к тормозному резистору. Контакторы с подписями «KM1», «KM2», «KM3» и «KM4» не должны изменять свое состояние в данном режиме.
Если включается режим вращения в прямом направлении, но электродвигатель вращается в реверсивном направлении и скорость вращения по модулю превышает 500 об/мин, то перед тем, как подключать якорную обмотку к источнику питания, необходимо перевести электродвигатель в режим торможения. В противном случае ток в якорной обмотке возрастет до недопустимых значений. После снижения скорости вращения ниже 500 об/мин необходимо подключить якорную обмотку к источнику питания для вращения двигателя. Аналогичная последовательность действий должна быть выполнена для режима реверса.
- 1 блок «Вход алгоритма» и 1 блок «Выход алгоритма» из вкладки «Сигналы». Данные блоки позволяют считывать и записывать сигналы базы данных.
- 1 блок «Сигнал больше уставки» и 1 блок «Сигнал меньше уставки» из вкладки «Нелинейные». Данные блоки необходимы для сравнения значения скорости электродвигателя с пороговым значением.
- 4 блока «Оператор И», 3 блока «Оператор ИЛИ» и 1 блок «NOT XOR» из вкладки «Логические». Данные блоки необходимы для реализации алгоритма управления.
- 3 блока «Импульс» из вкладки «Задержки и импульсы». Данные блоки необходимы для формирования импульсных сигналов замыкания/размыкания контакторов.
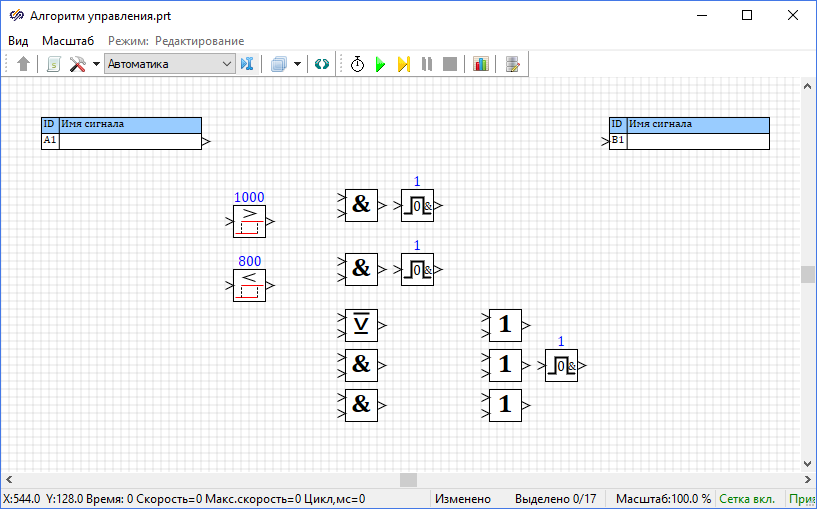
Рисунок 1. Окно проекта с добавленными блоками.
Перед соединением блоков необходимо задать их свойства, а также задать списки сигналов базы данных для записи и чтения.
