Цель работы
- Ознакомление с процедурами оптимизации в SimInTech на примере синтеза оптимального интегрирующего регулятора.
Формулировка заданий на параметрическую оптимизацию САР
При проектировании системы автоматического управления техническое задание содержит ряд требование, которые относятся к системе: перерегулирование, заданный запас устойчивости, динамическая и статическая ошибки. В итоге задача обеспечения требуемого качества переходных процессов в проектируемой системе автоматического управления формируется, как задача нелинейного программирования.
Объектом исследования является линейная следящая система, структурная схема которой изображена на рисунке (Рисунок 1).
- 1 блок «Константа» из вкладки «Источники»;
- 1 блок «Сравнивающие устройство» и 1 блок «Усилитель» из вкладки «Операторы»;
- 2 блока «Инерционное звено 1-го порядка», 1 блок «Передаточная функция общего вида» и 1 блок «Интегратор» из вкладки «Динамические»;
- «Временной график» из вкладки «Вывод данных».
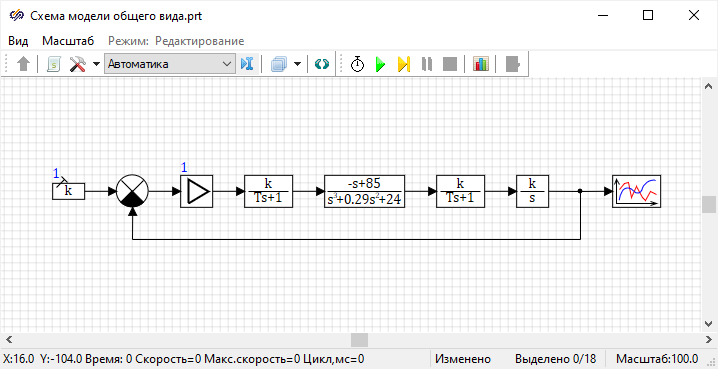
Рисунок 1. Структурная схема проектируемой САУ.
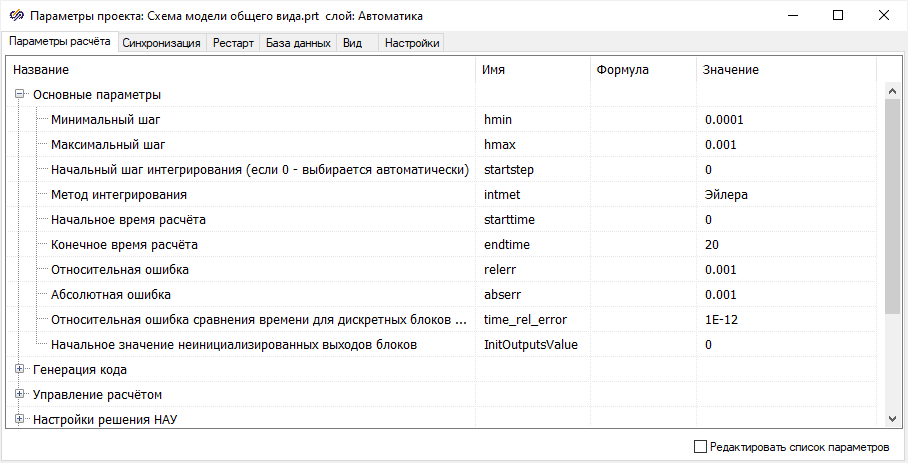
Рисунок 2. Окно «Параметры проекта».
- Для блока «Константа» изменить свойства согласно рисунку (Рисунок 3).
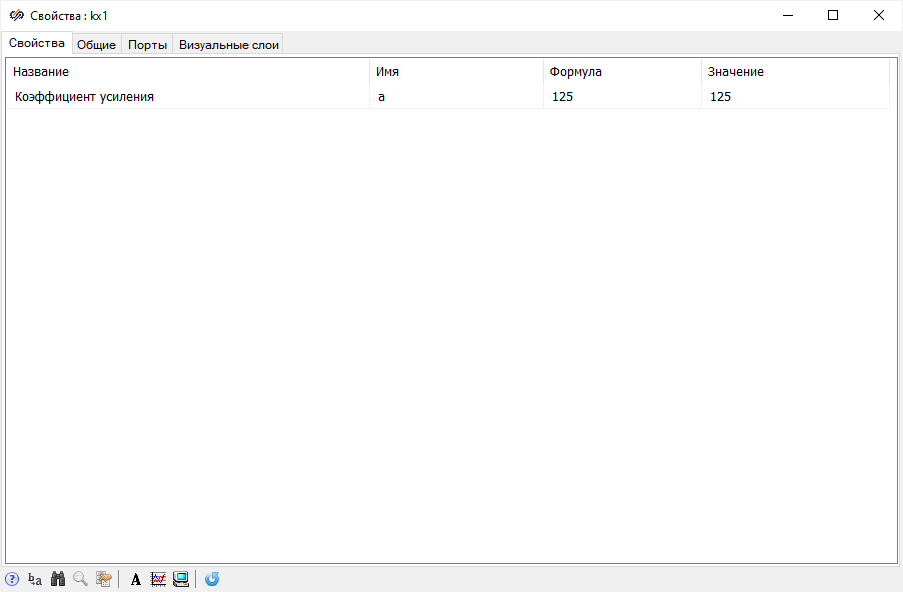
Рисунок 3. Свойства блока «Константа».
- Для блока «Инерционное звено 1-го порядка» изменить свойства согласно рисунку
(Рисунок 4).
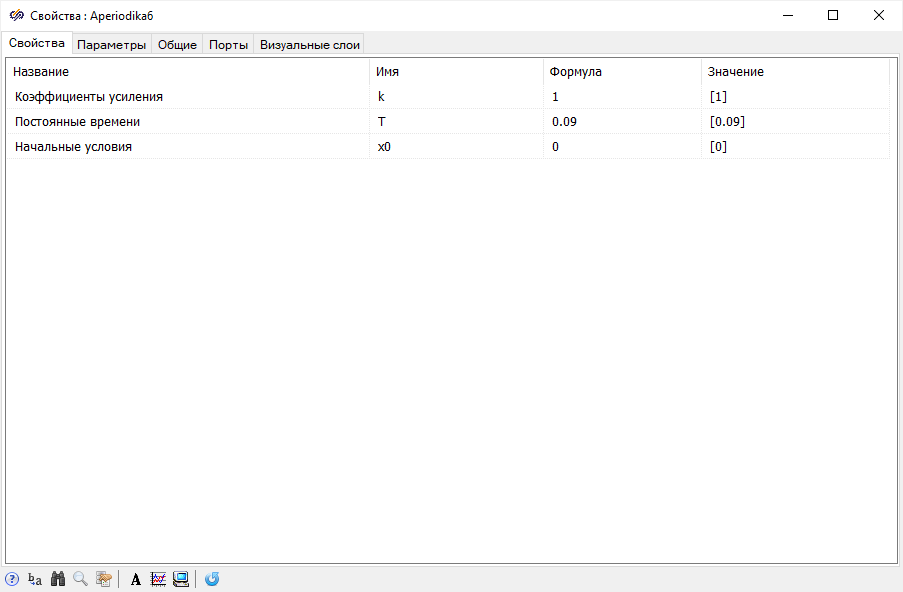
Рисунок 4. Свойства блока «Инерционное звено 1-го порядка».
- Для блока «Передаточная функция общего вида» изменить свойства согласно рисунку
(Рисунок 5).
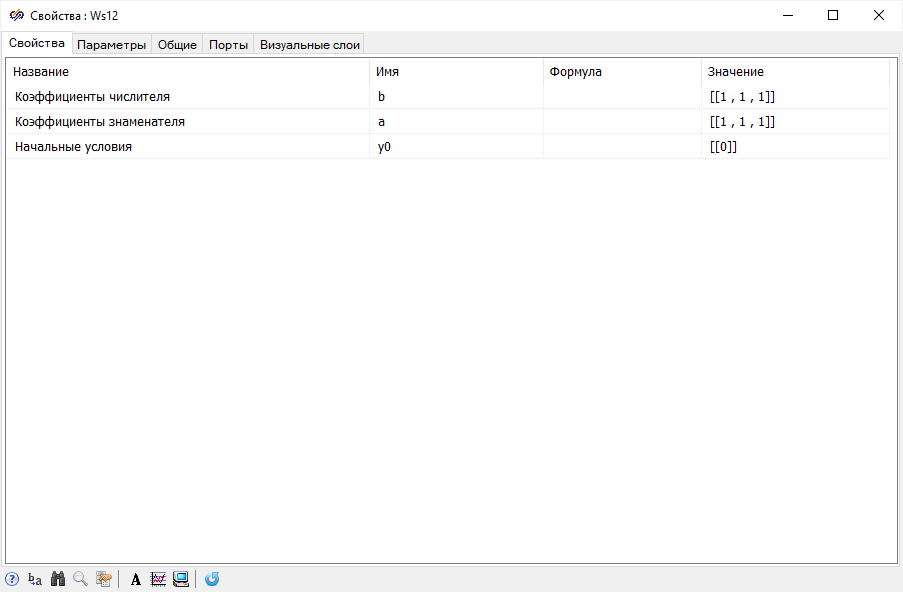
Рисунок 5. Свойства блока «Передаточная функция общего вида».
- Для блока «Инерционное звено 1-го порядка» изменить свойства согласно рисунку
(Рисунок 6).
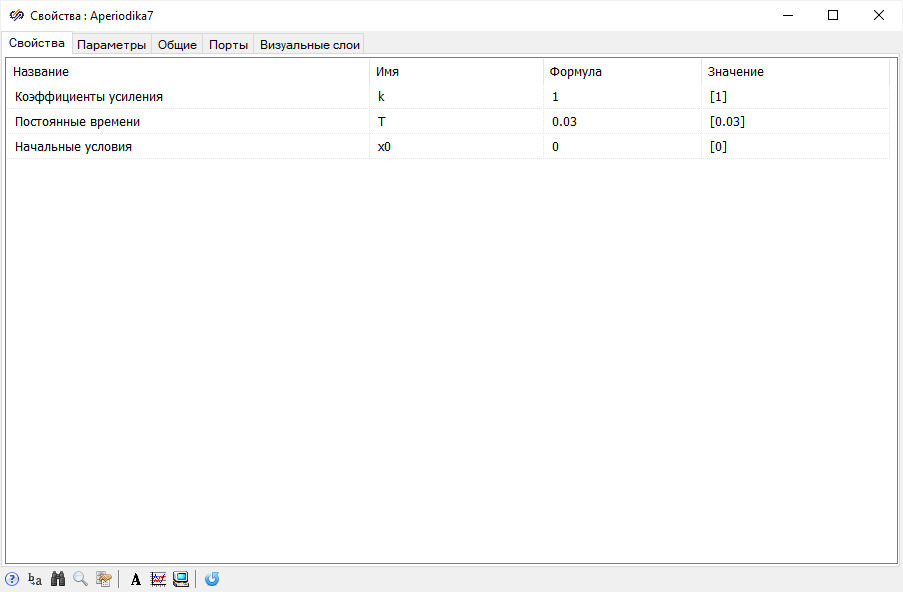
Рисунок 6. Свойства блока «Инерционное звено 1-го порядка».
- Для блока «Интегратор» оставить значения по умолчанию.
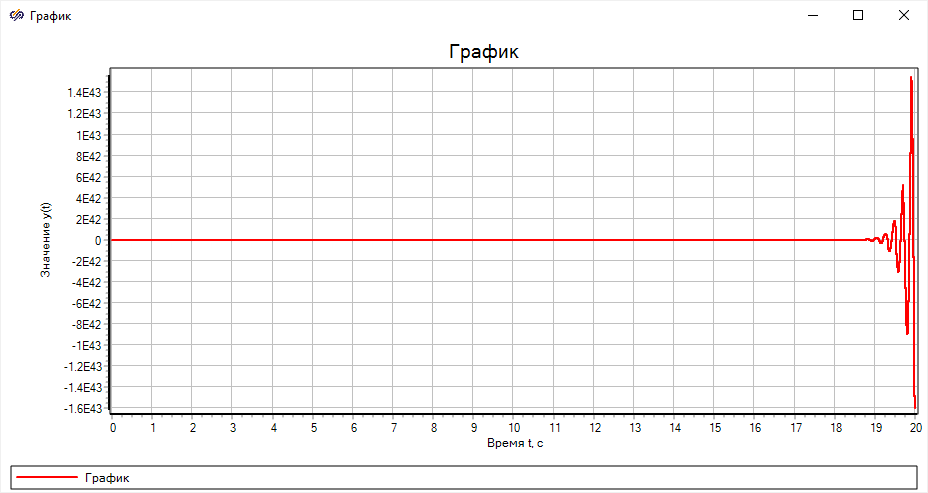
Рисунок 7. Переходной процесс при начальных условиях.
Последовательность действий по оптимизации
- задать варьируемые параметры как глобальные переменные (точнее - сигнал проекта), используя соответствующие интерфейсные процедуры;
- сформировать локальные критерии оптимизации, которые необходимы для решения основной задачи оптимизации;
- поместить на схему блок «Оптимизатор» и ввести в его настройках требуемые
данные, включая:
- имена варьируемых параметров, пределы их изменения и погрешность расчета,
- имена локальных критериев и допустимые пределы их значений;
- расчетный метод оптимизации и его настройки;
- запустить задачу.
Задание варьируемого параметра как глобального сигнала проекта
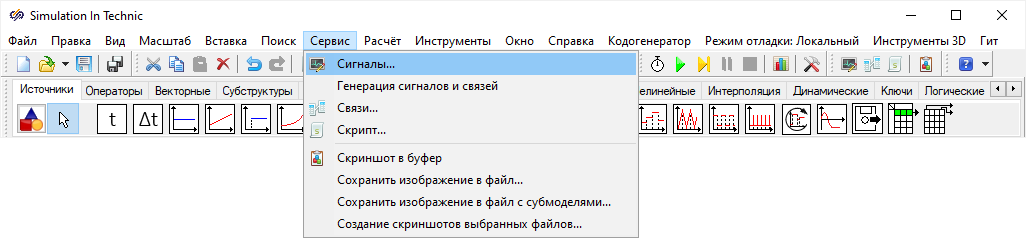
Рисунок 8. Пункт «Сигналы…».

Рисунок 9. Кнопка «Сигналы...».
Список сигналов проекта позволяет создать список переменных, которые используются в процессе моделирования во всех субмоделях проекта и обеспечивают доступ к данным переменным по их имени.
В открывшемся окне «Редактор сигналов проекта» в нижней части необходимо нажать на кнопку «Добавить сигнал» для добавления нового сигнала в списке сигналов. После создания сигнала пользователь получает возможность задать его имя и атрибуты.
- «k1», «k2», … «k6» – коэффициенты, сигнал (параметр), который оптимизируем в задаче;
- «tpp» – время переходного процесса;
- «dy» – величина перерегулирования.
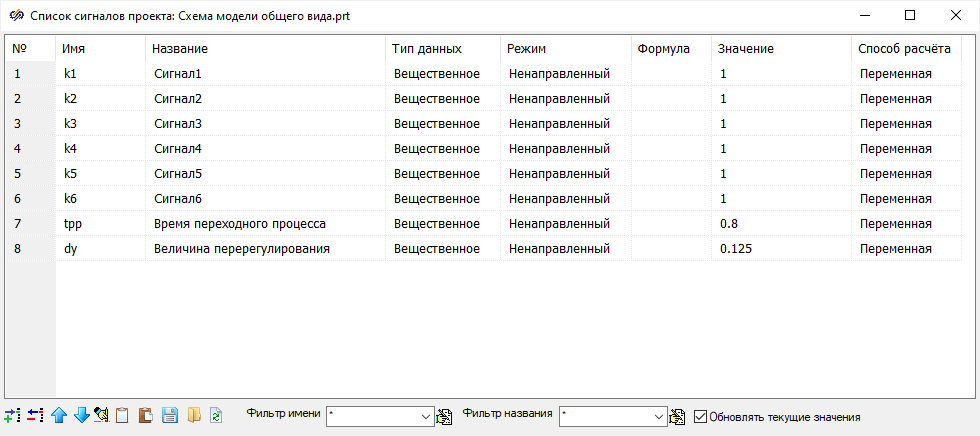
Рисунок 10. Список сигналов проекта.
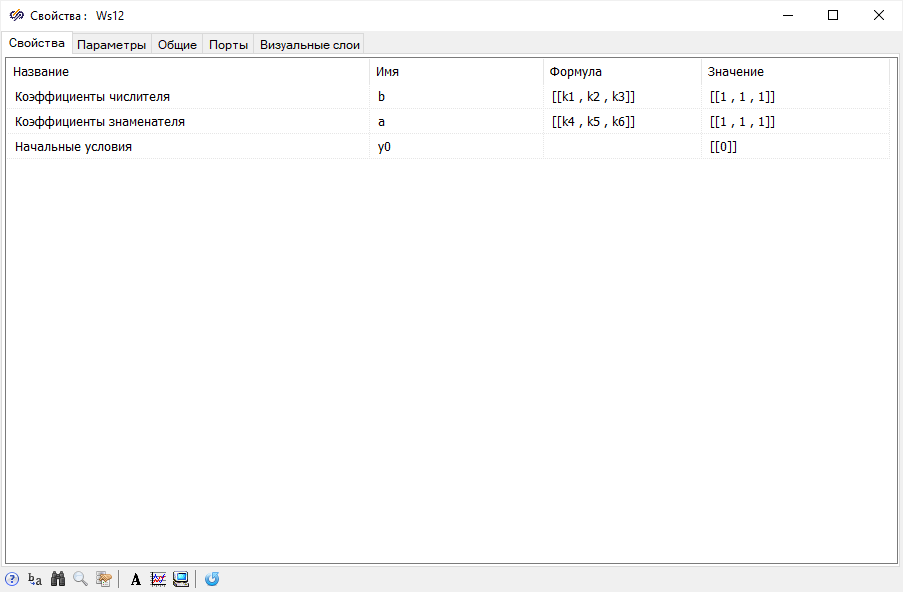
Рисунок 11. Свойства блока «Передаточная функция общего вида».
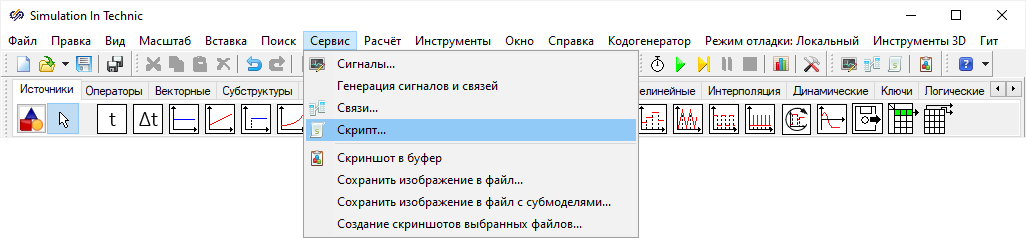
Рисунок 12. Пункт «Скрипт...».

Рисунок 13. Кнопка «Скрипт...».
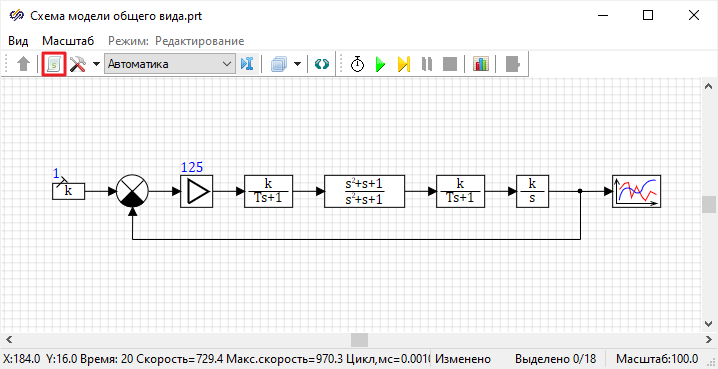
Рисунок 14. Кнопка «Скрипт…» в окне проекта.
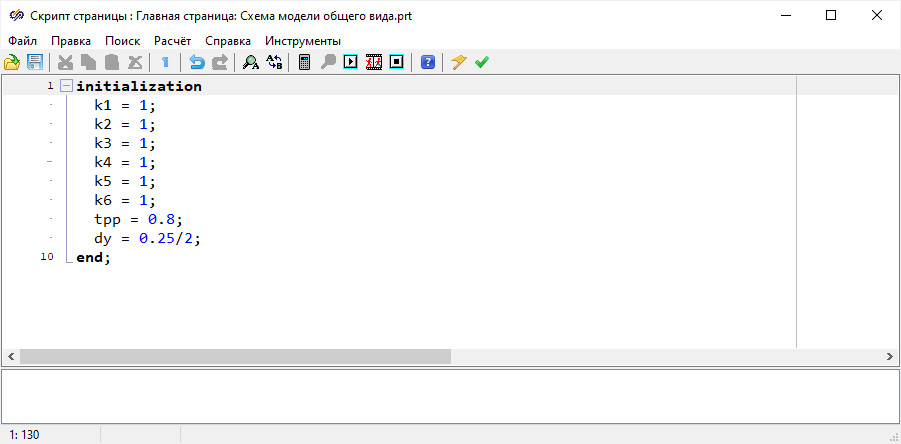
Рисунок 15. Окно «Скрипт страницы».
Расчет локальных критериев оптимизации
Для расчета параметров переходного процесса используем новую субмодель, в которой будет создана расчетная схема.Поместить на схему блок «Субмодель» из вкладки «Субструкутры» и осуществить двойное нажатие на блок для входа в субмодель.
- 2 блока «Порт входа» и 2 блока «Порт выхода» из вкладки «Субструктуры»;
- 1 блок «Абсолютное значение» из вкладки «Операторы»;
- 1 блок «Часы» из вкладки «Источники»;
- 1 блок «Ключи-3» из вкладки «Ключи»;
- 1 блок «Задержка на шаг интегрирования» и 1 блок «Нижний или верхний передел» из вкладки «Нелинейные».
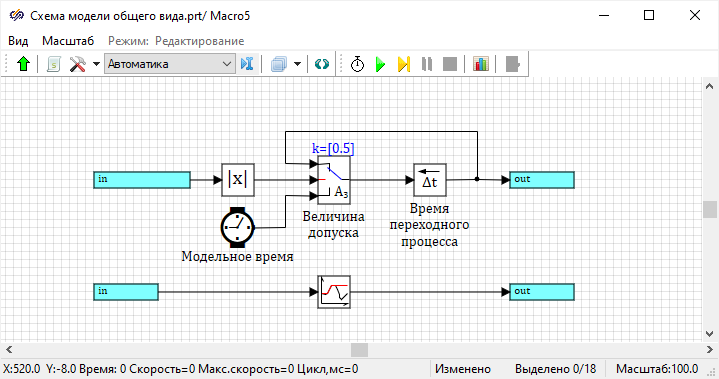
Рисунок 16. Расчет параметров переходного процесса.
- В свойствах блока «Ключ-3» с подписью «Величина допуска» задать значение свойства «Значения уставок» равным «0.21875», что соответствует 25%-й «трубке» от будущего установившегося значения.
-
В свойствах блока «Нижний или верхний предел» задать значение свойства «Тип операции» равным «Максимум», что обеспечит запись максимального значения величины, полученной из входного порта в список сигналов.
-
Задать название портов входов и выходом, путем двойного нажатия по блокам «Порт входа» и «Порт выхода» и вызова окна «Порт субмодели». В открывшемся окне в поле «Имена портов субмодели» задать названия портов «Рассогласование», «y(t)», «tpp», «dy» в соответствии с рисунком (Рисунок 17).
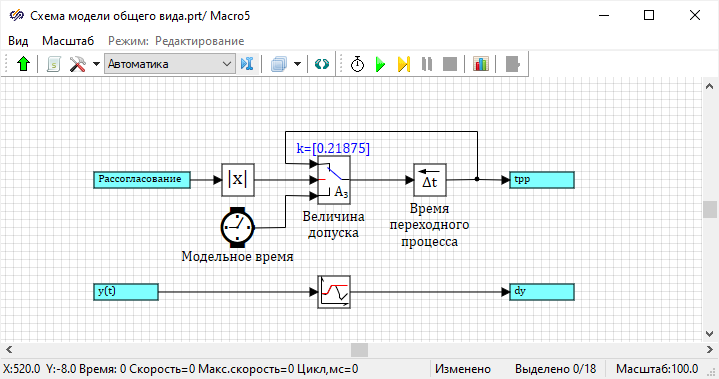
Рисунок 17. Рабочая область проекта с заданными параметрами блоков.
- На средний (логический) входной порт блока «Ключ-3» (Величина допуска) подается модуль сигнала рассогласования.
- Если этот сигнал больше уставки (25 % от 0.875), то на выход блока «Ключ-3» передается сигнал с 3-го (нижнего) входного порта, т.е. текущее модельное время.
- Если управляющий сигнал (на среднем входном порту) меньше уставки, то на выход блока «Ключ-3» передается сигнал с 1-го (верхнего) входного порта, т.е. тот же сигнал, но задержанный на один шаг интегрирования.
- Задержку на 1 шаг интегрирования осуществляет блок с подписью «Время переходного процесса» (блок «Задержка на шаг интегрирования» из вкладки «Нелинейные»).
Таким образом, после завершения расчета в переменных «tpp» и «dy» будет находиться значение времени переходного процесса и максимальное значение выхода из блока «Передаточная функция общего вида» .
Выйти из рабочей области субмодели, выполнив двойное нажатие мышью на свободное пространство окна проекта или нажав на клавишу «Pg Up».
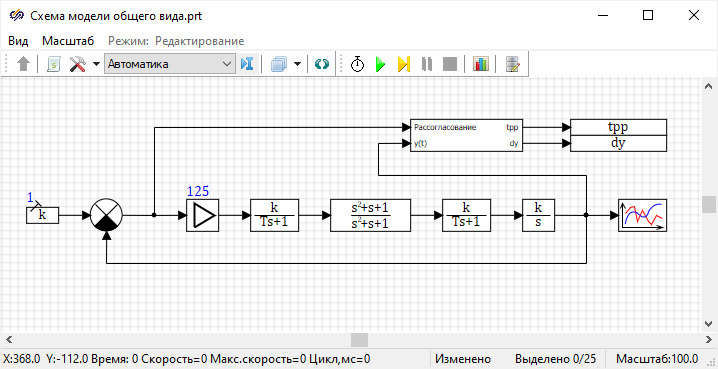
Рисунок 18. Схема с расчетом параметров переходного процесса.
Настройка блока оптимизация
- 2 блока «Чтение из списка сигналов» и 6 блоков «Запись в список сигналов» из вкладки «Сигналы»;
- 1 блок «Мультиплексор» и 1 блок «Демультиплексор» из вкладки «Векторные»;
- 1 блок «Оптимизатор» из вкладки «Анализ и оптимизация».
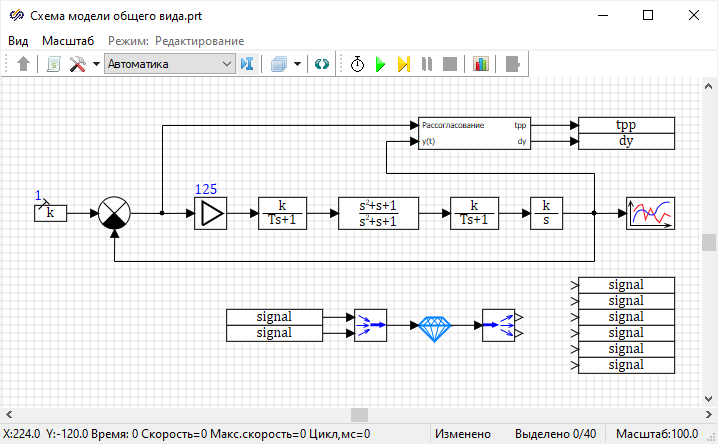
Рисунок 19. Рабочая облась проекта с размещенными блоками.
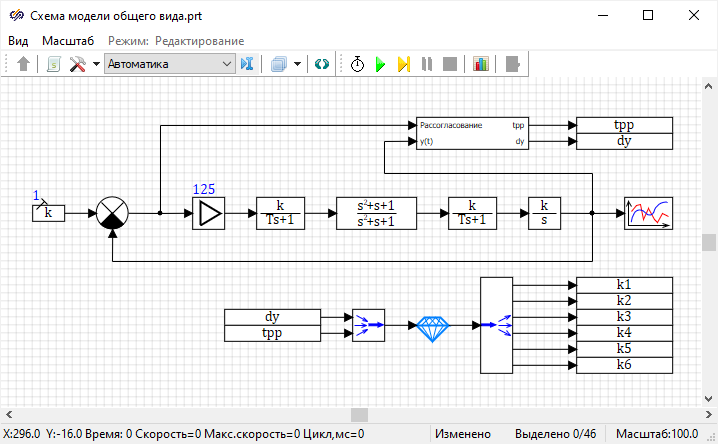
Рисунок 20. Рабочая область проекта с блоком «Оптимизатор».
Поясним работу данной схемы: два сигнала, максимальная величина значения – «dy», и время переходного процесса – «tpp», рассчитанные в блоке «Субмодель», упаковываются в вектор блоком «Мультиплексор» и передаются в блок оптимизации. Блок «Оптимизатор» рассчитывает значение, передаваемое в сигнал («k1», «k2», … «k6»), который, в свою очередь определяет коэффициенты в блоке «Передаточная функция общего вида», и должен обеспечить заданную характеристику переходного процесса.
- «Режим оптимизации параметров» – оптимизация осуществляется либо динамически в течение одного цикла моделирования системы, изменяя параметр оптимизации прямо в ходе моделирования, либо по полному переходному процессу системы с помощью серии последовательных циклов моделирования, в каждом из которых обновляется значение оптимизируемого параметра.
- «Периодичность анализа критериев оптимизации при расчете в динамике» - данное свойство используется при расчете критериев оптимизации в динамике.
- «Начальное приближение выходов блока» – данное свойство задает вектор начальных значений оптимизируемых параметров (в данном случае оптимизируемые параметры («k1», «k2», … «k6»). При необходимости создания вектора определенной размерности с одинаковыми элементами используется оператор «#» («A#B» - размножение числа B в вектор размерностью A).
- «Минимальные значения выходов блока» и «Максимальное значение выходов блока» – ограничивают диапазон поиска оптимальных параметров системы.
- «Абсолютная точность подбора значений выходов» – задает точность при расчете оптимизируемых параметров.
- «Начальное приращение выходов» – задает первый шаг приращения при подборе значений оптимума. Чем больше шаг, тем быстрее меняются подираемые значения в начале поиска экстремума, но также есть шанс что оптимальное значение будет пропущено. В данной задаче задается шаг равный точности расчета модели. Это замедляет расчет, но гарантирует поиск с заданной точностью.
- «Минимальные значения входных критериев оптимизации» и «Максимальные значения входных критериев оптимизации» – задают границы целевого диапазона критериев оптимизации.
- «Тип суммарного критерия оптимизации» – метод свертывания критериев, для формирования целевой функции.
- «Метод оптимизации» – метод свертывания критериев, для формирования целевой функции.
- Первый параметр – величина перерегулирования. По условию задачи необходимо на выходе системы попасть в трубку 25% от заданной величины, этому соответствует минимальное значение 0,875.
- Второй параметр – время переходного процесса. Минимальное время у нас не ограничено, поэтому оставляем 0.
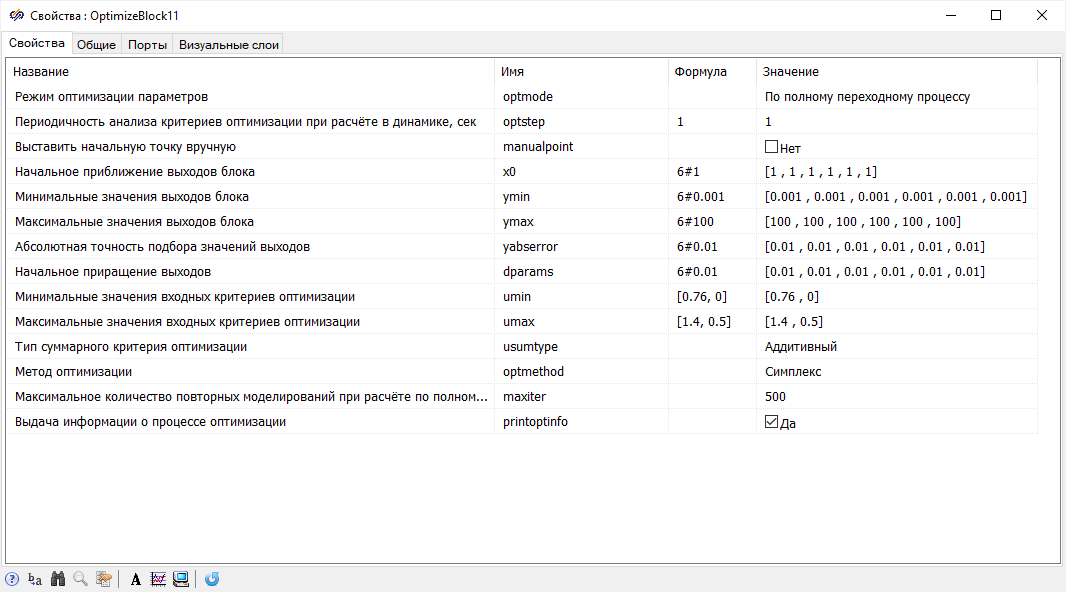
Рисунок 21. Свойства блока «Оптимизатор».
Расчет оптимального регулятора
При нажатии на кнопку «Пуск» в главном окне происходит запуск моделирование.
В данном случае в окне сообщений, в нижней части схемного окна появляется информация об оптимизированном параметре и достигнутых критериях оптимизации (Рисунок 22).
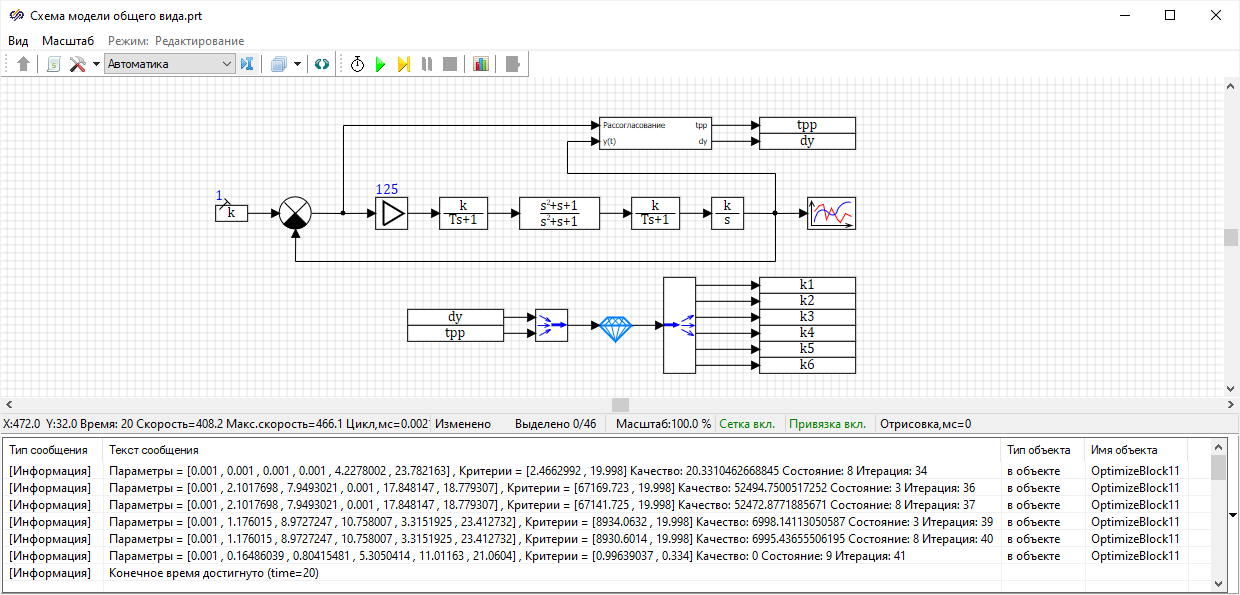
Рисунок 22. Расчет модели с оптимизацией параметров.
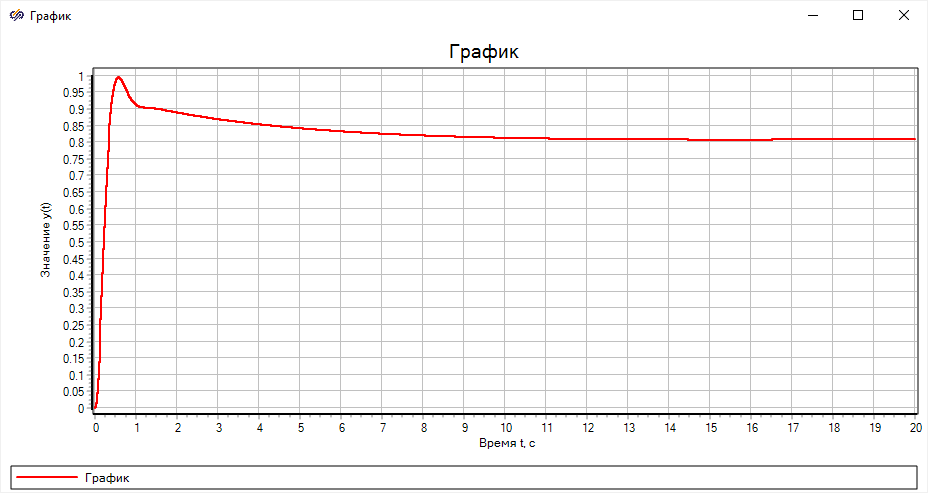
Рисунок 23. Оптимизированный переходной процесс.
Для того что бы посмотреть значение сигналов («k1», «k2», … «k6»), в который записано оптимизированное значение коэффициента, требуется дважды нажать на блок «Передаточная функция общего вида» или открыть «Список сигналов проекта» (Рисунок 24 и Рисунок 25).
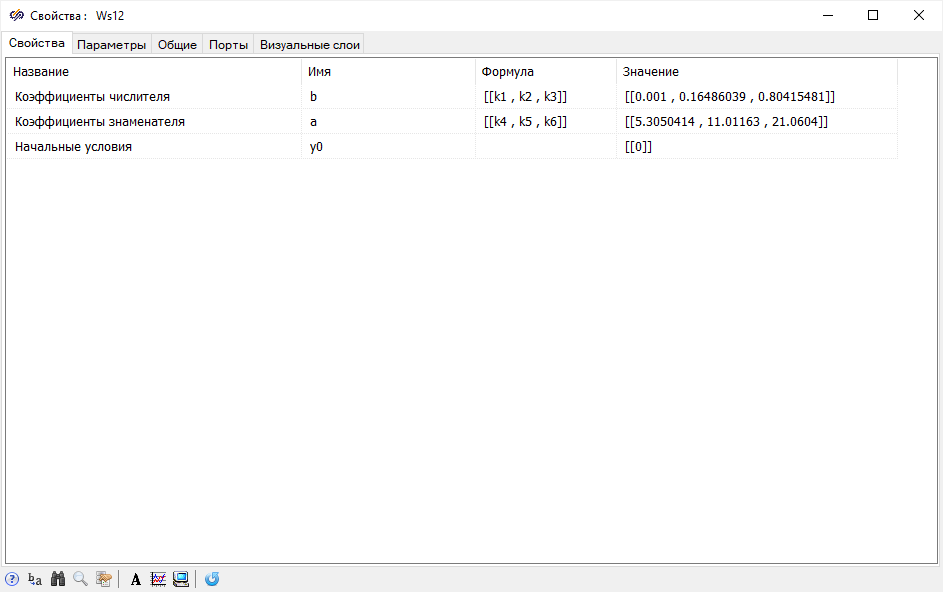
Рисунок 24. Значения оптимизированных коэффициентов.
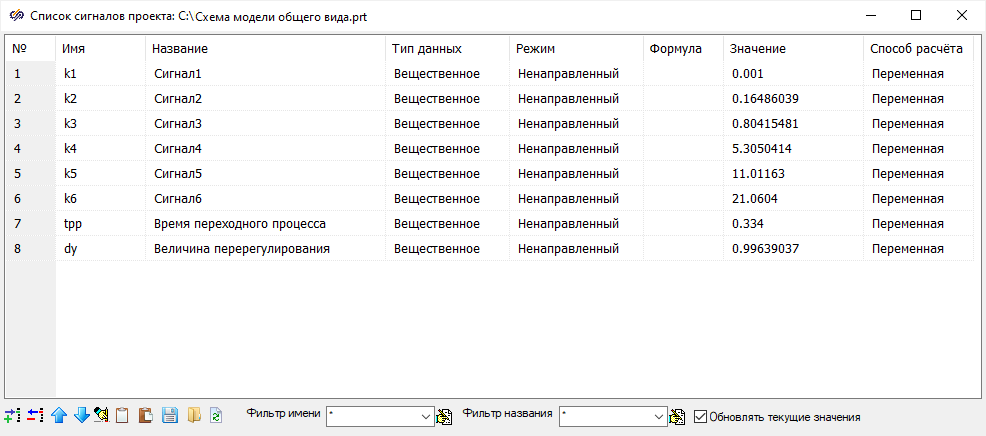
Рисунок 25. Значение оптимизированных сигналов.
