КРАТКОЕ ОПИСАНИЕ ПРОЦЕДУР РАБОТЫ В SIMINTECH
Основные этапы работы в SimInTech
В данном разделе рассматриваются основные процедуры работы, освоение которых является обязательным условием для самостоятельной работы в SimInTech.
Формирование структурной схемы и ее параметров, выбор метода, параметров интегрирования и т.п. целесообразно проводить в следующей последовательности:
- Используя палитру блоков, сформировать схему модели в окне проекта с использованием необходимых блоков.
- Соединить блоки линиями связи.
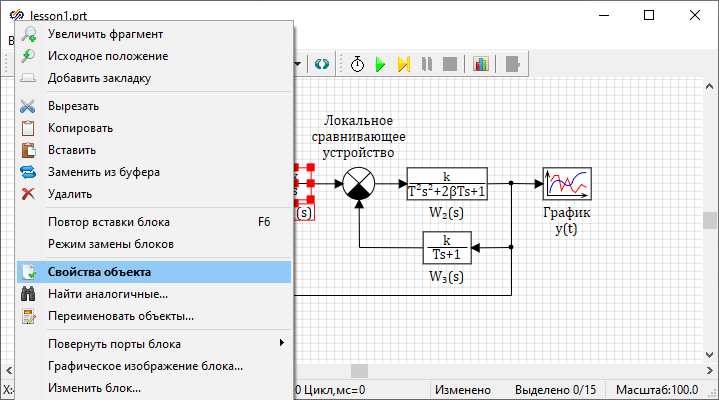
- Задать свойства блоков на структурной схеме.
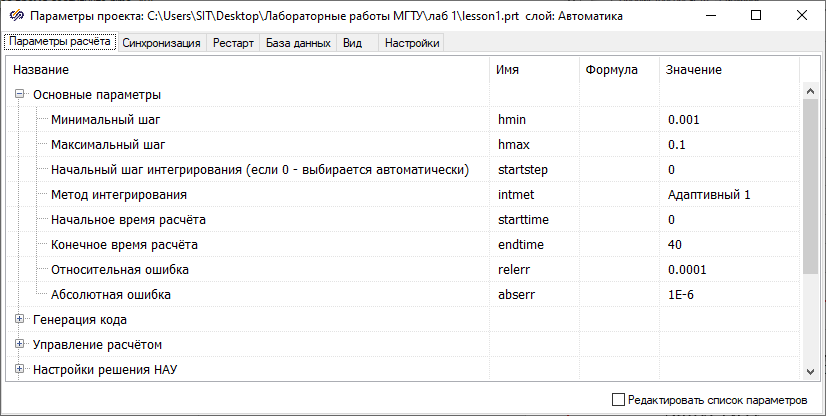
- Задать конечное время интегрирования, выбрать необходимый метод интегрирования и настроить другие параметры расчета.
- Сохранить проект.
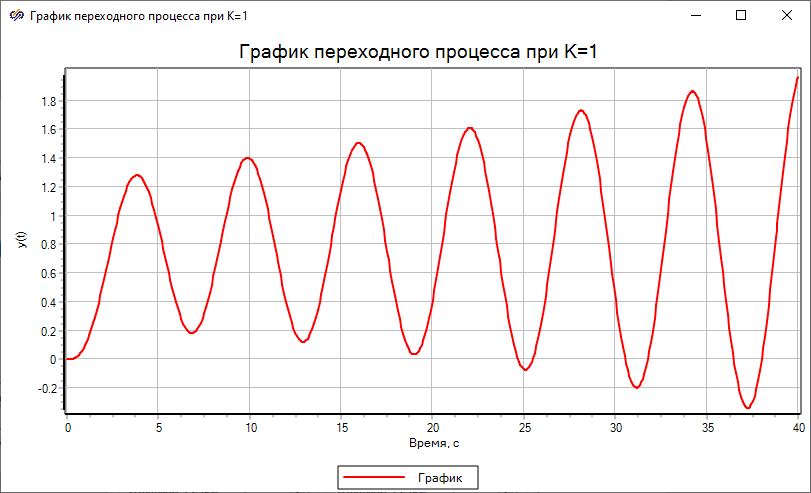
- Запустить проект на расчёт. Проанализировать результаты моделирования.
Динамика САР ядерного реактора.
Для ознакомления с функциональными возможностями SimInTech рассматривается демонстрационный пример «Релейный регулятор для САР ядерного реактора».
Необходимо запустить SimInTech. Нажатием на кнопку «Открыть» вызвать окно «Загрузка проекта» со списком файлов, имеющих расширение «.prt».
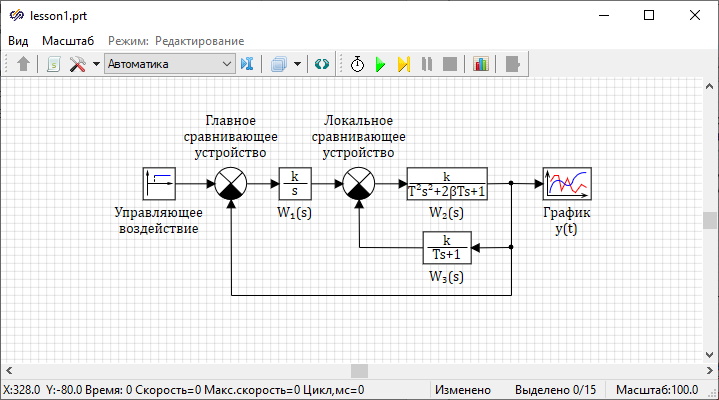
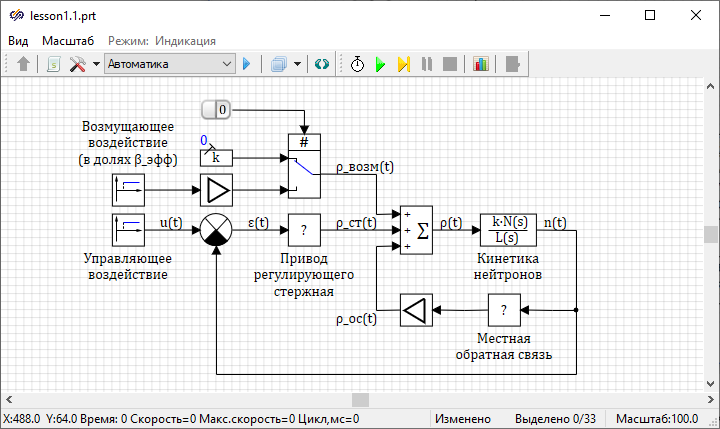
Перейти в папку с каталогом SimInTech (по умолчанию диск «C:»), выбрать «SimInTech\Demo\Автоматика и математика\Регуляторы\Релейные регуляторы\Релейный регулятор для САР ядерного реактора\Релейный регулятор для САР ядерного реактора.prt» и нажать на кнопку «Открыть». Откроется окно проекта со структурной схемой, представленной на рисунке (Рисунок 1), а также откроется график с заголовком «Реактивности в долях β_эфф и относительные отклонения нейтронной мощности».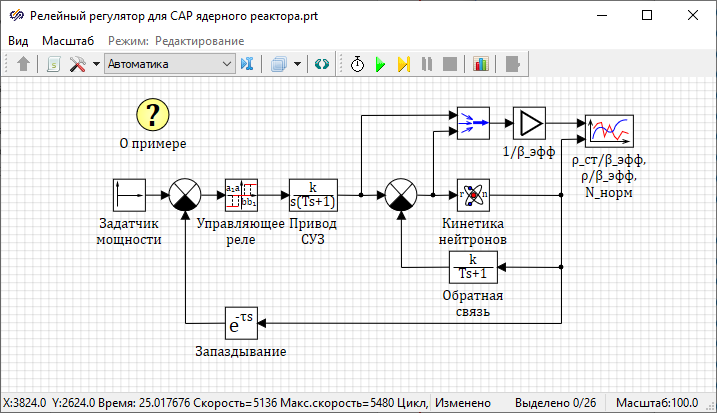
Рисунок 1. Структурная схема релейного регулятора САР.
Рассмотреть САР в которой управляющее воздействие от блока «Ступенька» с подписью «Задатчика мощности» равно нулю, то есть которая выведена из состояния равновесия (начальная реактивность температурной обратной связи ненулевая, а равна «1%» от βэфф). Левой кнопкой мыши выполнить нажатие на кнопку «Инициализация» в панели инструментов. Таким образом задача будет инициализирована (в нижнем левом углу окна появится сообщение о готовности проекта к старту: Старт). Выполнить нажатие на кнопку «Пуск» левой кнопкой мыши. Начнется процесс моделирования.
Полученные результаты свидетельствуют, что в реакторе установился режим высокочастотных автоколебаний мощности (Рисунок 2), амплитуда которых примерно в два раза превышает уставку по зоне нечувствительности равной одному проценту (блок «Релейное с зоной нечувствительности» с подписью «Управляющее реле»). Причинами автоколебаний являются узкая зона нечувствительности в блоке с подписью «Управляющее реле», а также относительно высокая скоростная эффективность в блоке «Инерционно-интегрирующее звено» с подписью «Привод СУЗ».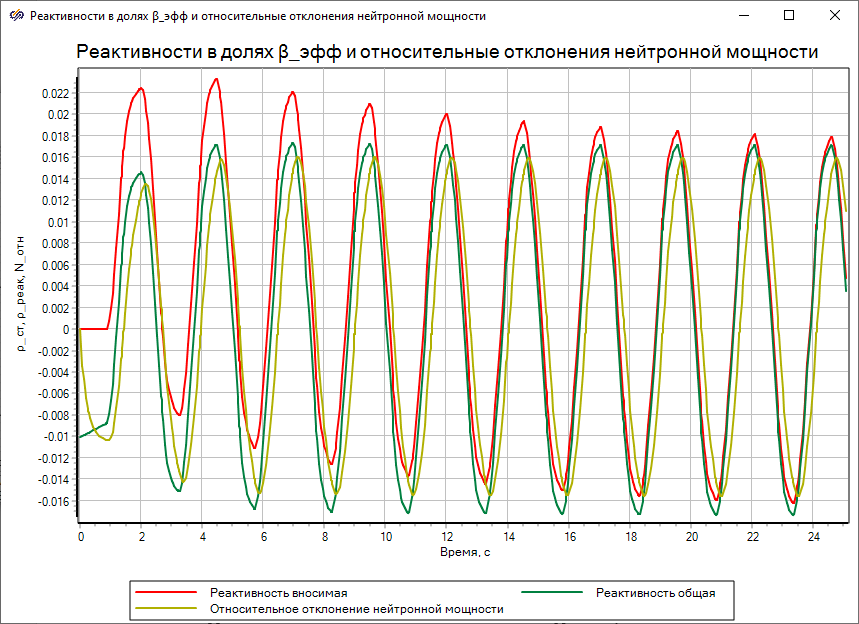
Рисунок 2. График высокочастотных колебаний.
Процесс моделирования можно начать без инициализации проекта, выполнив однократной нажатие на кнопку «Пуск».
Двойным нажатием левой кнопкой мыши по блоку с подписью «Управляющее реле» открыть окно «Свойства» этого блока. При помощи шести строк с именами «a1», «a», «b», «b1», «Y1», «Y2» задать в поле «Значение» свойства блока равные «-0.02», «-0.016», «0.016», «0.02», «-1», «1», а в строке «Начальные условия (-1=Y1; 0=0; 1=Y2)» задать значение равное «0» согласно рисунку (Рисунок 3). Настройка этих параметров соответствует зоне нечувствительности по относительному отклонению нейтронной мощности «±2%», коэффициенту возврата «0.8»и значению погрешности при срабатывании реле «±1.0». Снова запустить проект на расчет. Характер поведения графиков свидетельствует, что высокочастотных автоколебаний нет и САР асимптотически возвращается в равновесное состояние (Рисунок 4).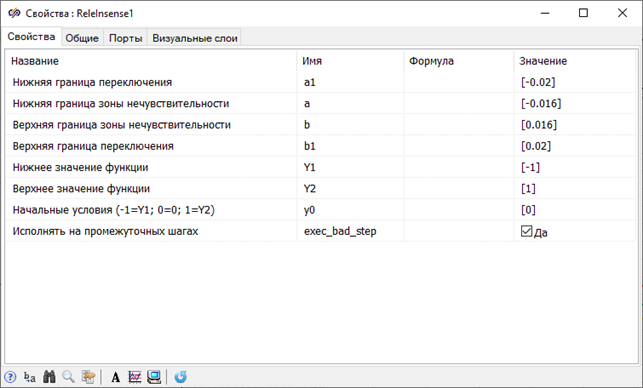
Рисунок 3. Окно «Свойства» блока с подписью «Управляющее реле».
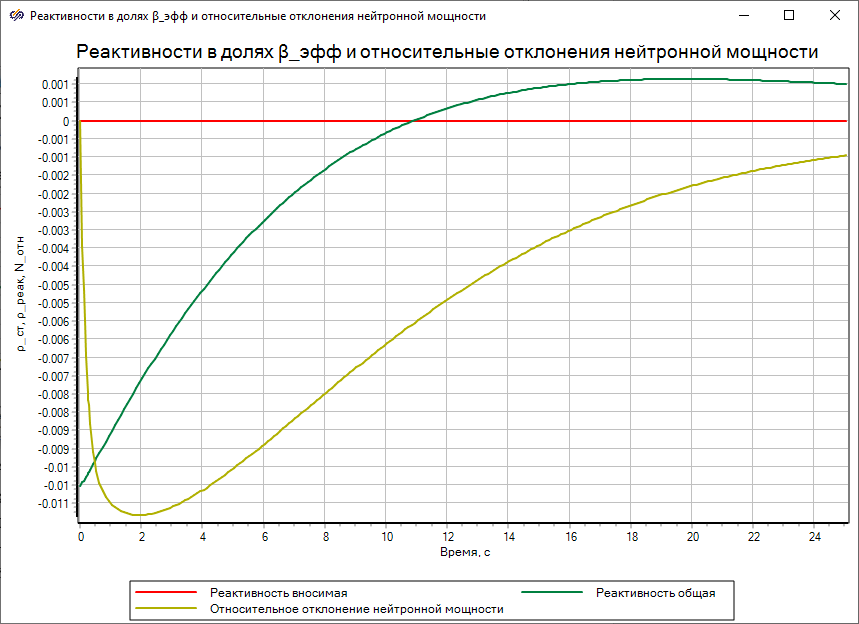
Рисунок 4. График без высокочастотных колебаний.
Задать свойства блока с подписью «Управляющее реле» согласно рисунку (Рисунок 5). Двойным нажатием левой кнопкой мыши на блок с подписью «Привод СУЗ» открыть окно «Свойства». Задать свойство «Коэффициент усиления» равным «1e-4».
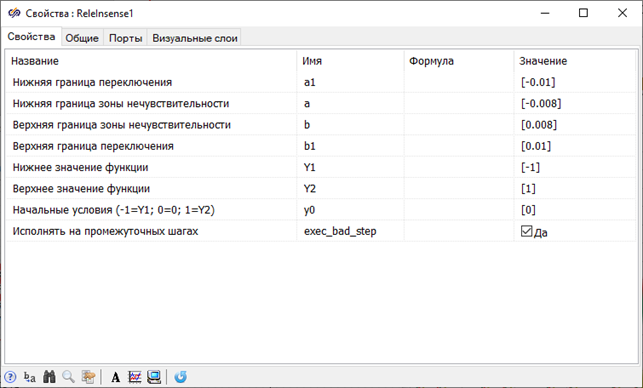
Рисунок 5. Окно «Свойства» блока с подписью «Управляющее реле».
Запустить проект на расчет. По окончании расчета проанализировать график: высокочастотных автоколебаний не будет, а блок с подписью «Привод СУЗ» изменит своё движение два раза (Рисунок 6).
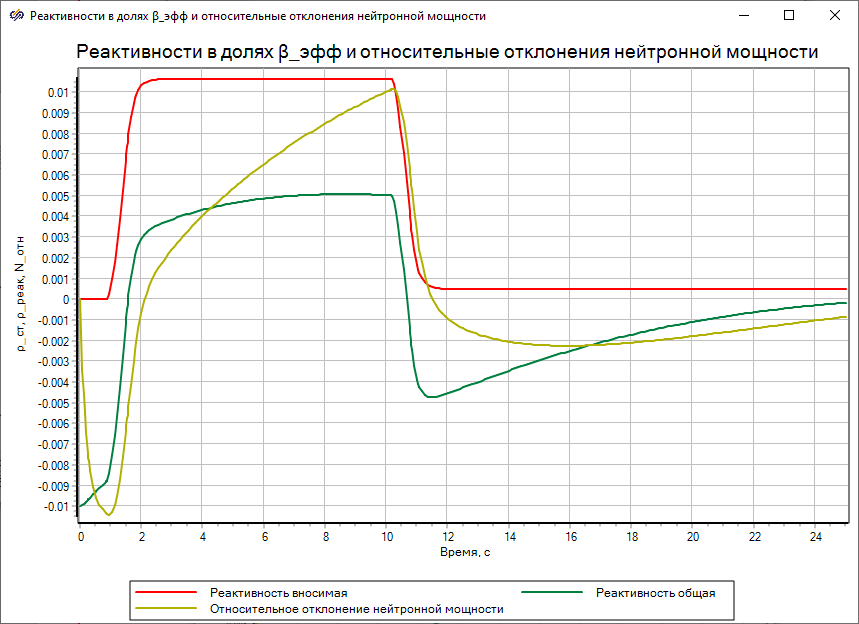
Рисунок 6. График без высокочастотных колебаний.
Рассмотреть неавтономную САР, которая десять секунд находится в равновесии, а после на неё подается управляющее воздействие, которое должно перевести ядерный реактор на повышенный уровень мощности «+10 %».
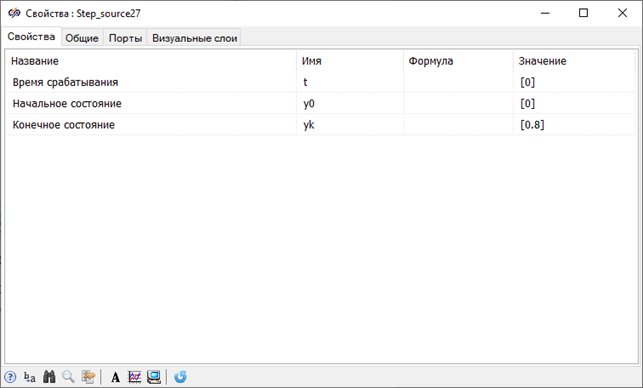
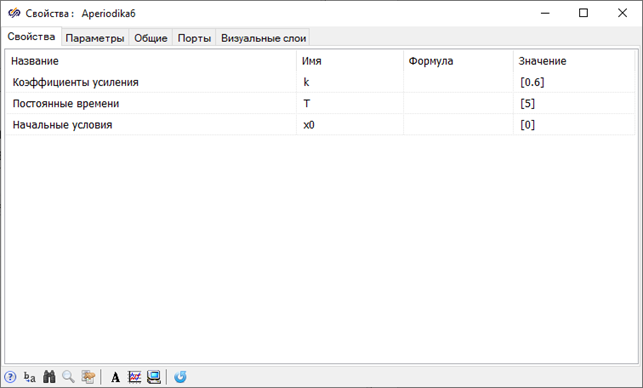
Двойным нажатием левой кнопкой мыши на блок «Инерционное звено 1-го порядка» с подписью «Обратная связь» вызвать окно «Свойства» и изменить значение «Начальное условие» на «0». Открыть окно «Свойства» блока с подписью «Задатчик мощности» и установить в строки с именами «t», «y0», «yk» значения «10» «0» «0.1» соответственно. Таким образом на вход блока «Сравнивающее устройство» будет подано ступенчатое воздействие равное «0.1» через десять секунд после начала расчёта.
Нажать на кнопку «Параметры расчета» и задать параметр «Конечное время расчёта» равным «100». Запустить проект на расчёт.
Анализ полученных результатов показывает, что ядерный реактор переведен на заданный уровень мощности с точностью до ширины зоны нечувствительности, регулирующий стержень внес дополнительную положительную реактивность «~6...7%» от βэфф, а реактивность ядерного реактора в переходном процессе в максимуме достигает «~6%» от βэфф и стремится к нулю обратно пропорционально времени (Рисунок 7).
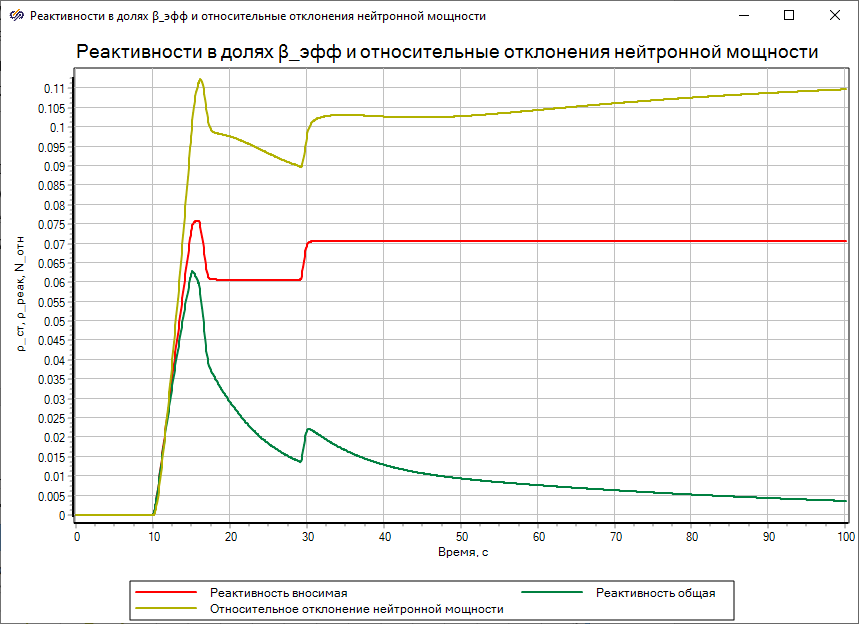
Рисунок 7. График вывода реактора на заданный уровень мощности.
Для отображения результатов расчета использована векторизованная обработка сигналов: сигналы реактивностей регулирующего стержня и реактора преобразуются в вектор с помощью блока «Мультиплексор», а затем поэлементно умножаются на коэффициент блока «Усилитель». Таким образом сигналы векторно нормированы на значение эффективной доли запаздывающих нейтронов βэфф.
Блок «Временной график» в данной задаче имеет два входа (первый вход – векторный, а второй – скалярный). С подробным описанием работы других блоков можно ознакомиться в справочной системе SimInTech.
После ознакомления с принципом работы данной схемы необходимо закрыть окно проекта без сохранения изменений. При необходимости можно ознакомиться с другими демонстрационными примерами в папке «Demo» директории установки SimInTech.