МЕТОДЫ ФОРМИРОВАНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ САР В SIMINTECH
Цель: рассмотреть программные возможности SimInTech в процессе формирования математической модели динамики объекта.
Преобразование форм математического описания САР и формулирование задач
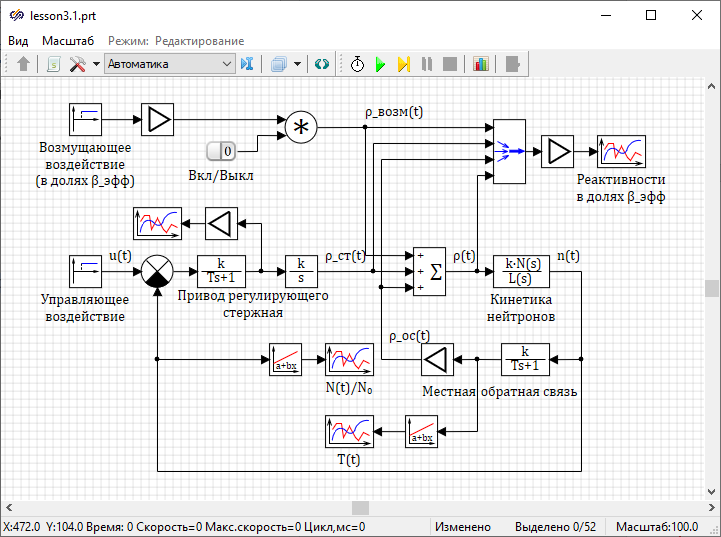
Структурная схема САР была рассмотрена в лабораторной работе №1 и представлена на рисунке (Рисунок 1).
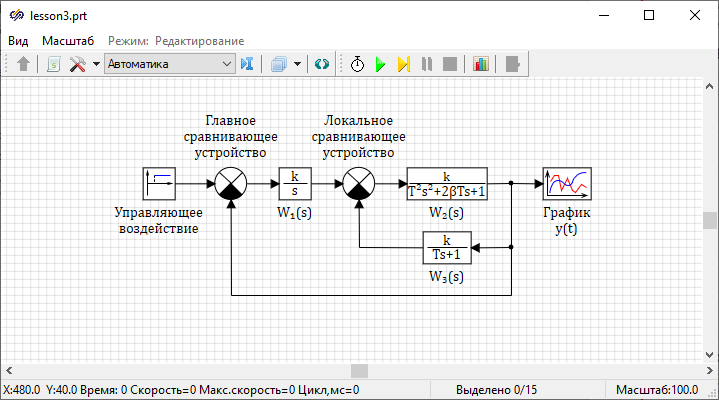
Рисунок 1. Структурная схема САР.
В рассматриваемой демонстрационно-ознакомительной задаче объект управления описывается тремя блоками (звеньями), а именно: блоками «Колебательной звено» с подписью «W2(s)» и «Инерционное звено 1-го порядка» с подписью «W3(s)», а также блоком «Сравнивающее устройство» с подписью «Локальное сравнивающее устройство».
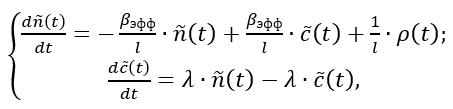
Динамика объекта управления в данной задаче описывается следующей системой линейных уравнений:
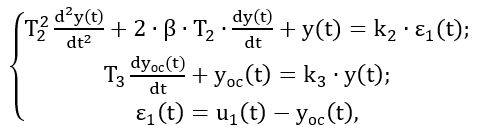
при нулевых начальных условиях, т.е. y(0)=0, y`(0)=0, yос(0)=0.
Введя новые динамические переменные y1(t)=y(t) и y2(t)=y`(t) можно привести математическое описание динамики объекта управления к форме Коши:
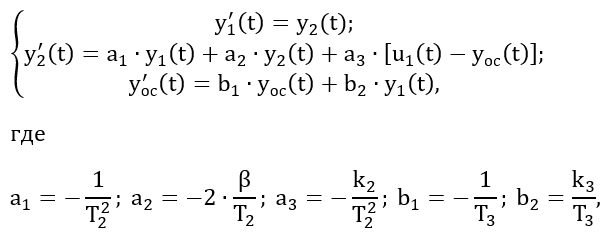
а начальные условия для новых динамических переменных равны нулю.
К форме Коши можно привести математическое описание уравнений динамики САР, добавив к системе уравнение динамики для интегрирующего регулятора (блок «Интегратор» с подписью «W1(s)») и алгебраическое соотношение для блока «Сравнивающее устройство» с подписью «Главное сравнивающее устройство». В этом случае система уравнений динамики САР подготовлена для перехода к описанию в переменных состояния, примет вид:
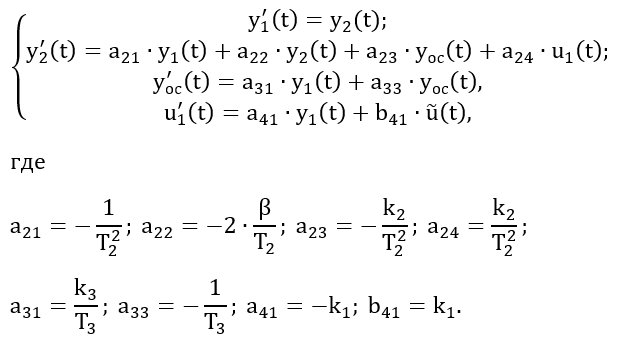
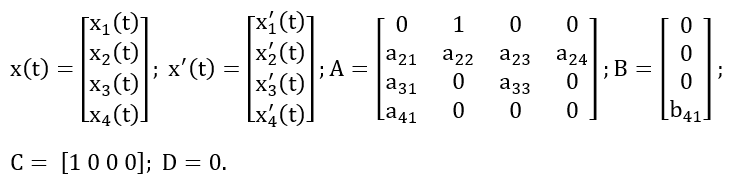
После ввода очередных новых динамических переменных x1(t), x2(t), x3(t) и x4(t), равных, соответственно, y1(t), y2(t), yос(t) и u1(t), описание динамики САР можно представить в матричной форме, а именно, в переменных состояния:
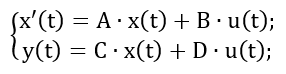
где вектор-столбец производных переменных состояния «x'(t)», вектор-столбец переменных состояния «x(t)», матрица системы «А», матрица входа «В», матрица выхода «С» и матрица обхода «D» в представленной задаче равны:
Формирование структурной схемы и ее параметров, целесообразно проводить в следующей последовательности:
- Добавить на схему блок «Субмодель» из вкладки «Субструктуры» и задать для него подпись «Параллельная САР».
- Задать коэффициенты системы уравнений блока «Субмодель» с помощью окна «Скрипт страницы».
- Задать описание уравнений динамики объекта управления в блоке «Субмодель» с подписью «Параллельная САР» с использованием блока «Язык программирования» из библиотеки «Динамические».
- Задать описание уравнений динамики САР с использованием блока «Переменные состояния» из библиотеки «Динамические», расположенного в субмодели с подписью «Параллельная САР».
- Реализовать обмен данными между исходным САР и субмоделью «Параллельная САР», используя блоки «В память» и «Из памяти» из библиотеки «Субструктуры».
Создание новой субмодели
Этап 1 – перенос типового блока «Субмодель» в окно проекта.
Открыть сохранённый проект из лабораторной работы №1. Добавить на схему блок «Субмодель» из вкладки «Субструктуры». В появившемся на схеме блоке отсутствуют входные и выходные порты. Задать блоку «Субмодель» подпись «Параллельная САР».
Этап 2 – создание структурной схемы субмодели.
Двойным нажатием левой кнопкой мыши по блоку «Субмодель» зайти в субмодель.
Добавить в рабочую область субмодели блоки «Порт входа» и «Порт выхода» из вкладки «Субструктуры», «Сравнивающее устройство» из вкладки «Операторы», блоки «Интегратор» и «Язык программирования» из вкладки «Динамические» и блок «Временной график» из вкладки «Вывод данных». Расположить блоки в окне субмодели согласно рисунку и задать им соответствующие подписи (Рисунок 2).
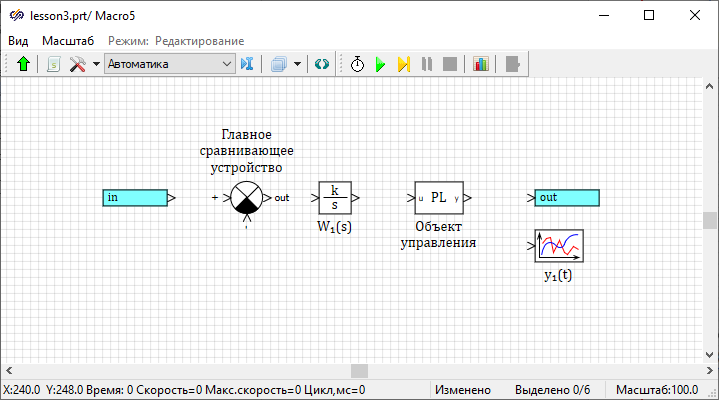
Рисунок 2. Структурная схема субмодели с подписью «Параллельная САР».
Если условия какой-то решаемой задачи требуют, чтобы блок «Субмодель» имел, например, три входных порта и два выходных порта, то необходимо перенести в рабочую область блока «Субмодель» три блока «Порт входа» и два блока «Порт выхода». Первому перенесенному в это окно блоку «Порт входа» будет соответствовать верхний входной порт блока «Субмодель», второму – средний входной порт, а третьему – нижний входной порт. Аналогично, первому перенесенному блоку «Порт выхода» в рабочую область блока «Субмодель» будет соответствовать верхний выходной порт, а второму – нижний выходной порт.
Примечание: рекомендуется именовать порты входа и выхода субмодели уникальными именами (для данной субмодели).
Этап 3 – подключение субмодели к структурной схеме.
Двойным нажатием левой кнопки мыши по свободному пространству рабочей области, выйти из субмодели. В свойствах блока «Временной график» задать значение свойства «Количество входных портов» равным «2». Для этого необходимо нажать правой кнопкой мыши по блоку «Временной график» и выбрать пункт «Свойства объекта». Подключить блок «Субмодель» согласно рисунку (Рисунок 3).
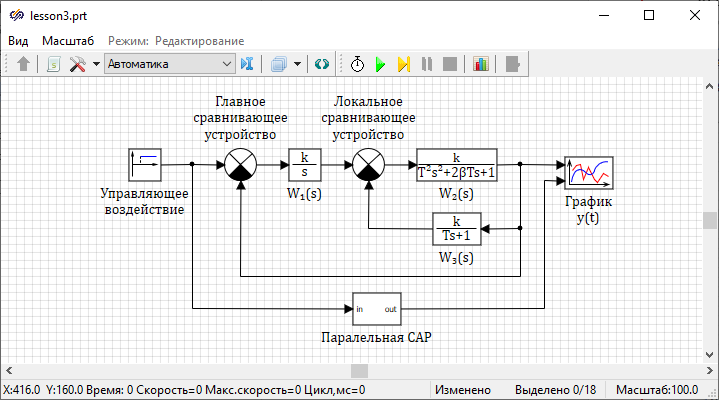
Рисунок 3. Структурная схема САР.
Аналогичным способом можно составить схему из неограниченного количества блоков «Субмодель», а также можно добавлять блоки «Субмодель» в уже существующие субмодели схемы для создания многоуровневой структуры проекта.
Задание параметров САР через механизм «Скрипт проекта»
«Язык программирования» SimInTech предназначен для создания программ, описывающих функционирование объектов структурной схемы. С его помощью можно сформировать блок на языке программирования, который будет являться частью структурной схемы или описать взаимодействия между разными объектами в окне проекта. Подробнее ознакомиться с возможностями языка программирования SimInTech можно в справочной системе в разделе «Язык программирования».
Окно редактора «Скрипт страницы» – фактически является окном текстового редактора, в котором можно, по определённым правилам, задать значения или выражения ряда параметров САР, называемых глобальными переменными, которые в процессе моделирования остаются постоянными либо изменяющимися по какому-либо закону, описанному в скрипте. Интерпретатор математических функций распознает более 30-ти операторов, включая математические (+, -, *, /, sin, tg, ln и т.п.), логические (if, for и др.), ключевые слова и системные константы (time, step, goodstep, pi и др.), функциональные операторы (interpol, fft и др.), а также более 700-х различных функций. Более подробная информация об интерпретаторе математических функций будет представлена в следующем подразделе.
Открыть окно редактора «Скрипта страницы» (кнопка «Скрипт» находится в верхнем левом углу окна проекта).
Ввести код, описывающий задание глобальных констант, и комментарии (в фигурных скобках «{…}» задаются многострочные комментарии, а двойным прямым слэшем «//…» однострочные), как показано на рисунке (Рисунок 4).
После ввода основного текста (цвет шрифта – черный и синий) и комментариев к нему (цвет шрифта – зеленый), необходимо нажать кнопку «Применить» (зелёная галочка в правой части окна) и закрыть окно «Скрипт страницы».
На этом процедуры задания глобальных констант завершены.
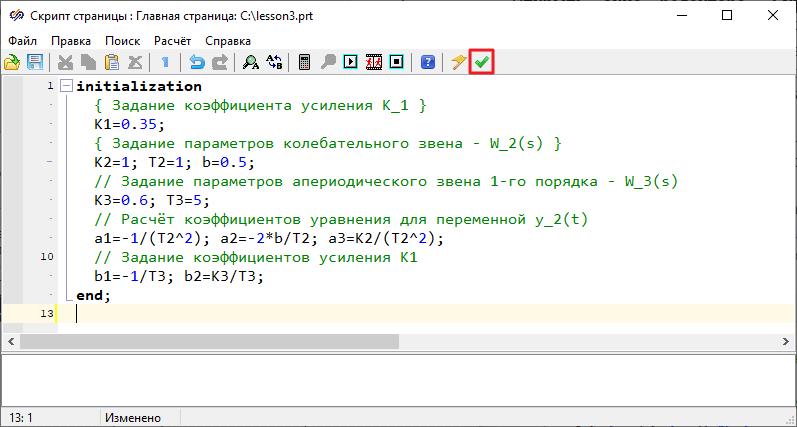
Рисунок 4. Скрипт окна проекта.
Если в окне проекта параметры САР заданы как глобальные константы, то они могут быть использованы для задания свойств конкретных блоков не только в этом окне, но и во всех субмоделях этого проекта.
Если имя константы в субмодели совпадает с именем глобальной константы, то локальная константа становится приоритетной в расчёте субмодели.
Для определения констант следует воспользоваться ключевым словом «const».
Примечание: секция «initialization … end;» необходима для однократного определения переменных при запуске расчёта проекта.
Формирование уравнений динамики с использованием блока «Язык программирования»
Учитывая, что невозможно сформировать абсолютно полную библиотеку типовых блоков, в SimInTech разработаны средства, которые позволяют пользователю расширить состав личной библиотеки за счет создания новых типов блоков, например, посредством встроенного в SimInTech языка программирования.
Блок «Язык программирования» предназначен для создания блока с индивидуальным описанием функционирования данного блока на языке программирования, который будет участвовать в расчёте схемы.
Окно этого блока полностью аналогично окну редактора «Скрипта страницы». Пользователь в текстовом виде может записать алгебраические уравнения и уравнения динамики, которые будут задействованы в проекте.
Математическое описание блока может соответствовать многомерной нелинейной динамической системе в форме Коши:
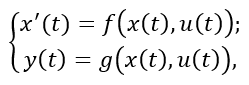
где f(x(t), u(t)), g(x(t), u(t)) – известные нелинейные функции переменных (x1, x2, … xn) и входных воздействий (u1, u2, … um), причем в качестве входных воздействий могут выступать и коэффициенты (постоянные или переменные), входящие в любое из уравнений.
Первое из уравнений системы может отсутствовать: в этом случае блок «Язык программирования» выполняет алгебраические преобразования входных величин. Использование этого блока в качестве функционального весьма эффективно в случае наличия в модели сложных функциональных преобразований, когда использование для этих целей элементарных типовых блоков приведет к неоправданному усложнению структурной схемы.
Рассмотреть освоение процедур формирования математической модели динамики устройства или фрагмента рабочего процесса с использованием блока «Язык программирования» на примере формирования уравнений динамики объекта управления, расположенного в субмодели (Рисунок 2).
Необходимо зайти в блок «Субмодель» с подписью «Параллельная САР» и двойным нажатием левой кнопкой мыши по блоку «Язык программирования» с подписью «Объект управления» открыть окно редактора, в котором необходимо записать выражения и дифференциальные уравнения, соответствующие математической модели данного блока.
Панель инструментов окна редактора блока «Язык программирования» и его интерфейс полностью идентичны описанному выше окну редактора «Скрипта страницы».
Ввести математическую модель динамики блока с подписью «Объект управления», как это показано на рисунке (Рисунок 5).
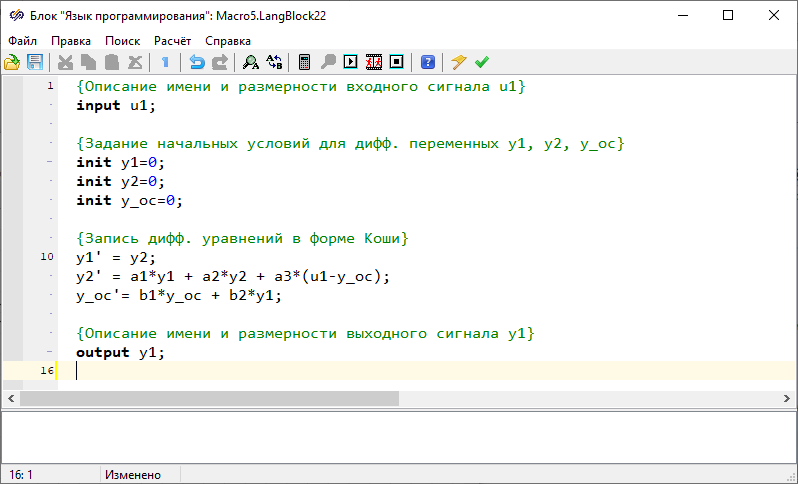
Рисунок 5. Математическая модель динамики объекта управления.
Если блок «Язык программирования» имеет входные порты, то первая исполняемая строка обязательно должна содержать оператор «input», описывающий входные сигналы в данный блок, включая имя входа и его размерность.
В данном примере первая исполняемая строка «input u1;» присваивает первому входу уникальное имя «u1». Если бы, например, этот блок имел бы два входа, причем первый вход был-бы векторный с тремя сигналами, а второй – векторный с пятью сигналами, то первая исполняемая строка имела бы вид: «input u1[3], g[5];».
Для описания размерности входов используются прямоугольные скобки.
Если блок «Язык программирования» описывает динамику объекта моделирования в виде системы дифференциальных уравнений в форме Коши, то вторая исполняемая строка обязательно должна содержать оператор «init», описывающий начальные условия для динамических (дифференциальных) переменных, для которых будут записаны обыкновенные дифференциальные уравнения в форме Коши.
В данном примере пятая и последующие две исполняемые строки «init y1 = 0; init y2 = 0; init y_oc = 0;» задает начальные условия (при t = 0) для трёх динамических переменных: «y1(t)», «y2(t)» и «y_ос(t)».
В том случае, когда математическая модель динамики блока описывается большим числом дифференциальных уравнений, например, пятью, то вторая исполняемая строка будет иметь вид:
«init x1 = 0; init x2 = 1; init x3 = 2; init z = 0 ;init R = 0;»
где «х1», «х2», «х3», «z», «R» – динамические переменные, для которых будут записаны дифференциальные уравнения в форме Коши.
Непосредственно дифференциальные уравнения динамики объекта управления записаны с десятой по двенадцатую исполняемые строки, где символ апострофа обозначает производную по времени, а значения коэффициентов «a1», «a2», «a3», «b1», «b2» передаются в блок через механизм глобальных переменных.
Если блок «Язык программирования» имеет порты, то одна из исполняемых строк обязательно должна содержать оператор «output», описывающий выходные сигналы блока, включая имена выходов и их размерности.
В данном примере последняя строка «output y1;» описывает один выходной сигнал «y1» без указания в прямоугольных скобках размерности выходного сигнала.
Если бы блок имел два векторных выхода с двумя и тремя сигналами соответственно, то последняя исполняемая строка имела бы, вид: «output z1[2], z2[3];»
В этом случае необходимо определить все составляющие выходных сигналов, например:
«z1[1] = a1 + sin(y1); z1[2] = exp(y2);
z2[1] = y1 * y2; z2[2] = sqrt(abs(y_oc)); z2[3] = (y2)^a2;»
После ввода всего текста скрипта в окно «Редактора» нажать на кнопку «Закрыть и применить» для принятия изменений в блоке «Язык программирования» и закрытия окна редактора. Блок с подписью «Объект управления» отобразится в окне проекта с одним входным портом (u1) и одним выходным (y1).
В блоке с подписью «W₁(s)» в поле «Формула» задать свойство «Коэффициент усиления» равным «К1». Соединить блоки линиями связи согласно рисунку (Рисунок 6).
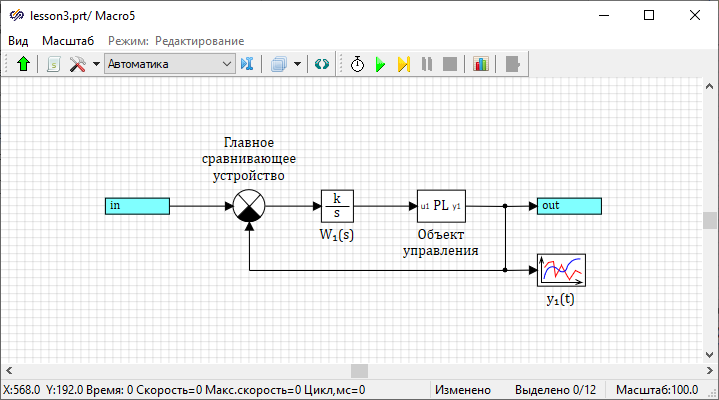
Рисунок 6. Структурная схема субмодели с подписью «Параллельная САР».
Выйти из субмодели и убедиться, что в окне проекта коэффициент усиления в блоке с подписью «W₁(s)» равен «0.35». Запустить проект на расчёт и убедиться, что результаты расчета для обеих САР совпадают. Для этого нажать правой кнопкой мыши на график «График переходного процесса при К=0.35» и выберете кнопку «Свойства». В окне «Свойства графика» установить для первой линии параметры: «стиль линии» – «сплошная», «толщина линии» - «4», «цвет линии» – «красный», а для второй линии: «стиль линии» – «штриховая», «цвет линии» – «жёлтый», «толщина линии» - «2»; тогда наложенные графики будут иметь вид, близкий к рисунку (Рисунок 7).
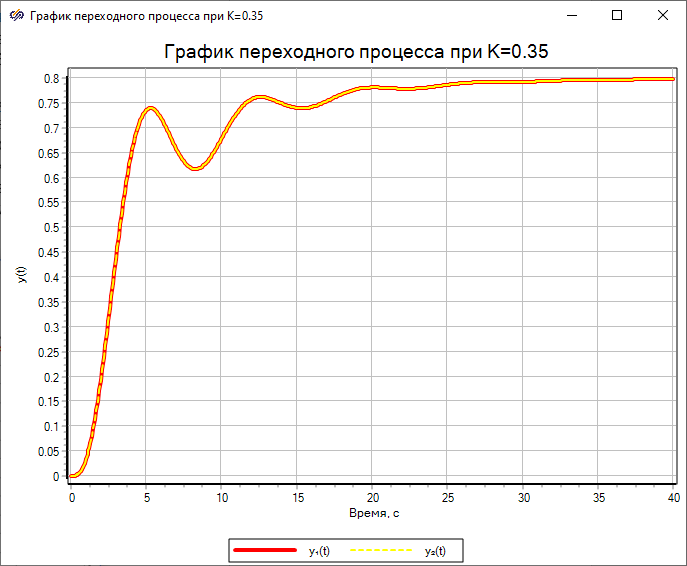
Рисунок 7. График переходного процесса.
Для создания математической модели рабочего процесса, описываемого сложными нелинейными дифференциальными уравнениями с переменными коэффициентами (например, процессы теплогидравлики в элементах теплофизического оборудования), целесообразнее использовать блок «Язык программирования», причем иногда – только для формирования правых частей системы дифференциальных уравнений (записанных в форме Коши).
В таком варианте процедуру интегрирования можно реализовать с использованием типового блока «Интегратор» (блок векторизован), расположенного за блоком «Язык программирования», причем выходной сигнал блока «Интегратор» подается на вход блока «Язык программирования», не образуя алгебраической петли (контура).
По такому принципу можно реализовать процедуру интегрирования для блока с подписью «Объект управления» в субмодели с подписью «Параллельная САР».
На рисунке представлено окно редактора, в котором реализован алгоритм вычисления правых частей дифференциальных уравнений, описывающих динамику блока «Язык программирования» с подписью «Объект управления» (Рисунок 8).
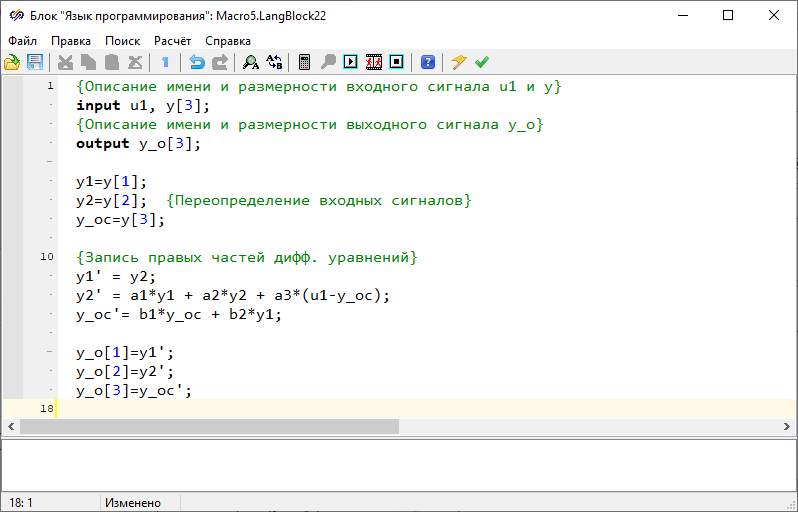
Рисунок 8. Окно редактора блока «Язык программирования».
Запись «y1'=...» обозначает не первое дифференциальное уравнение, а просто определяет новую переменную с именем «y1'». Новый входной сигнал «y», является векторным и вводит в блок значения динамических переменных «y1», «y2» и «y_oc» после каждого шага интегрирования. На выходе блока «Язык программирования» сформирован векторный сигнал «y_out» с размерностью, равной трем «y = [y1, y2, y_oc]». Нажать кнопку «Закрыть и применить».
Поместить в рабочую область субмодели блок «Интегратор» из вкладки «Динамические» и блок «Демультиплексор» из вкладки «Векторные». В блоке «Интегратор» задать свойство «Коэффициент усиления» равным «[1,1,1]», а свойство «Начальные условия» равным «[0, 0, 0]». В блоке «Демультиплексор» задать свойство «Массив размерности выходов» равный «[1, 2]». Соединить блоки линиями связи как показано на рисунке (Рисунок 9).
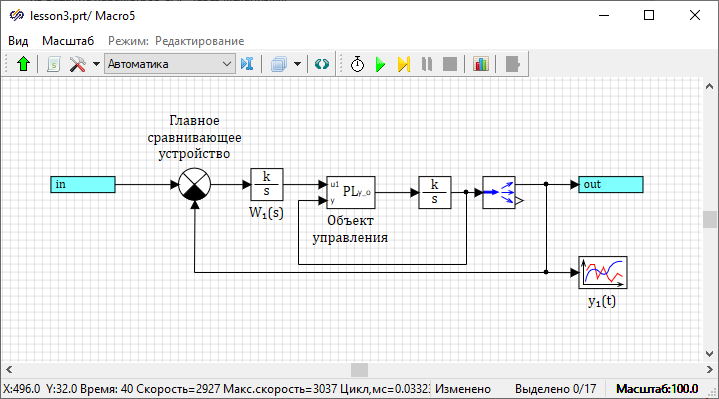
Рисунок 9. Структурная схема субмодели с подписью «Параллельная САР».
Блок «Демультиплексор» позволяет разделить вектор и выбрать сигнал «y1».
Запустить проект на расчёт и убедиться, что графики переходных процессов САР совпадают.
Сохранить данный вариант проекта под новым именем.
Формирование уравнений динамики САР в переменных состояния
Освоить методы формирования уравнений динамики линейных САР с использованием типового блока «Переменные состояния».
Зайти в блок «Субмодель» с подписью «Параллельная САР». Пометить в рабочую область субмодели блок «Переменные состояния» из вкладки «Динамические». Соединить блок линиями связи и сделать подписи согласно рисунку (Рисунок 10).
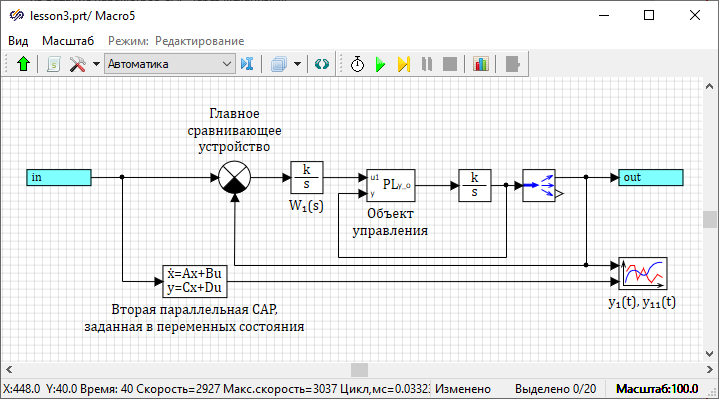
Рисунок 10. Схема субмодели с подписью «Параллельная САР».
В блоке «Переменные состояния» матрицы «А», «В», «С» и «D» задаются не по строкам, а по столбцам.
Матрица входа «В», фактически являющаяся вектором-столбцом и нулевая матрица обхода «D» не требуют дополнительных пояснений для ввода в соответствующие строки окна свойств блока «Переменные состояния».
Матрица «А», определенная соотношениями, при задании в окне свойств блока «Переменные состояния» должна представляться как вектор-строка, содержащая четыре элемента, каждый из которых является числовым вектором и содержит по четыре элемента (числовые или символьные значения соответствующего столбца матрицы «А»).
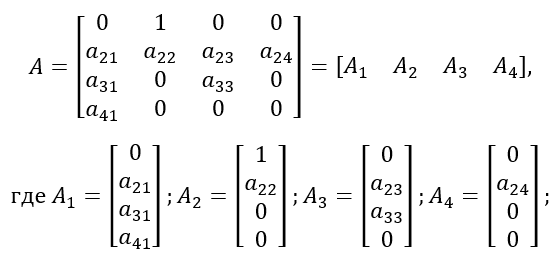
Матрица «С» также должна представляться как вектор-строка, содержащая четыре элемента, каждый из которых является числовым вектором и только в данной задаче содержит по одному элементу:
C = [C1 C2 C3 C4], где C1 = [1]; C2 = [0]; C3 = [0]; C4 = [0];
Задание свойств блока «Переменные состояния» выполнить через механизм «Скрипт проекта». В субмодели открыть окно «Скрипт страницы». Ввести текст, как это выполнено на рисунке (Рисунок 11).
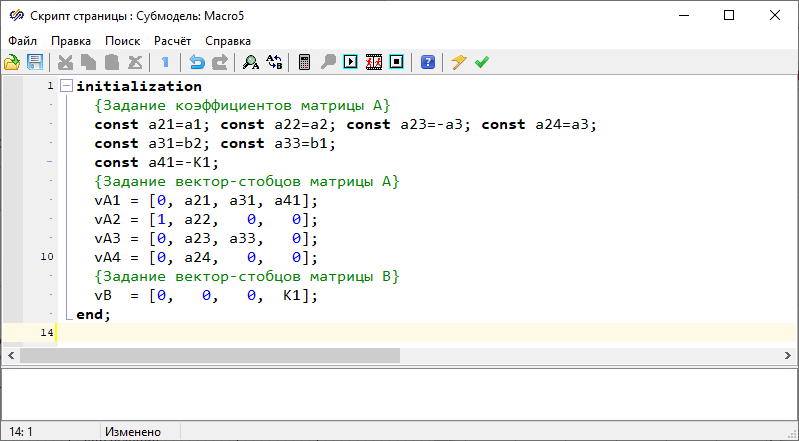
Рисунок 11. Скрипт страницы субмодели.
Поскольку коэффициенты «а1», «а2», «а3», «а4» и «К1» определены как глобальные константы в окне редактора «скрипта проекта», в данном окне редактора они используются для задания элементов матрицы «А», не равных нулю или единице. Левая часть выражения «vА1 = [0, a21, a31, a41];» определяет имя переменной «vA1», а правая часть задает значение переменной, равное вектору из четырёх действительных чисел, значения которых заданы как в числовом «0», так и в символьном виде «а21, a31, a41».
Внимание: при задании значений элементов любой векторной переменной в символьном виде не допускается знак минус перед символьным элементом. Например, запись «vА1 = [0 a21 a31 -K1];» является некорректной из-за последнего элемента «-К1», а именно: при интерпретации выражения сначала будет произведено вычитание «a31-K1», и вектор в правой части будет считан интерпретатором как вектор из трёх элементов. Следует использовать символы запятой для разделения значений вектора в строке.
Заполнив окно редактора «Скрипт страницы» субмодели, закрыть его нажатием на кнопку «Закрыть и применить».
Открыть окно «Свойства блока» для блока «Переменные состояния» и задать свойства согласно рисунку (Рисунок 12), задавая все элементы матриц «А», «В», «С» и «D» по столбцам. В строках свойств блока любой вектор-столбец заключен в квадратные скобки.
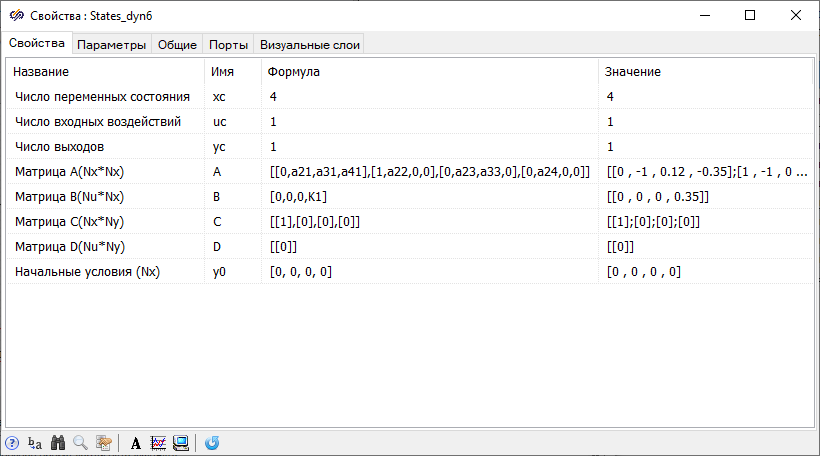
Рисунок 12. Свойства блока «Переменные состояния».
В окне свойств блока матрицы «А», «В», «С» и «D» можно задавать в более компактном виде, используя векторные переменные «vА1», «vА2», «vА3», «vА4» и «vВ», определенные как глобальные переменные в окне редактора «Скрипт страницы» (Рисунок 13).
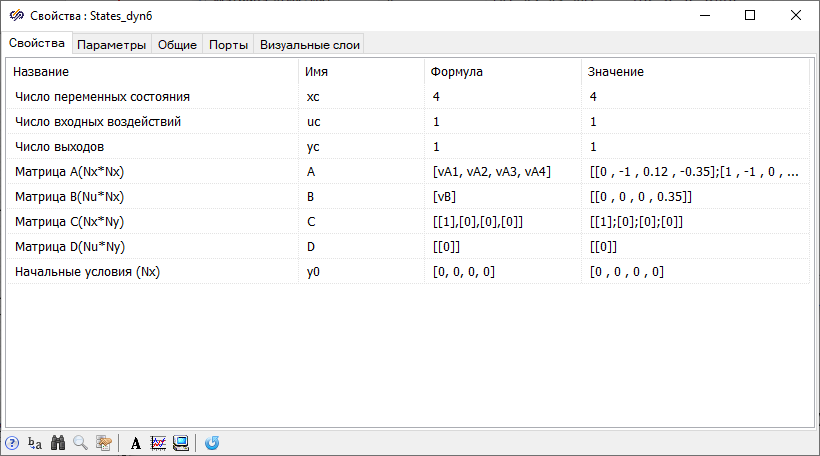
Рисунок 13. Свойства блока «Переменные состояния».
Запустить расчёт модели и убедиться, что графики переходных процессов САР, заданной с использованием блока «Язык программирования» и САР заданной с использованием блока «Переменные состояния», совпадают. Для этого в свойствах графика установить для первой линии следующие параметры: «тип линии» – «сплошная двойной толщины», «цвет линии» – «розовый», а для второй линии: «тип линии» – «пунктирная», «цвет линии» – «синий». Графики результатов расчета будут иметь вид, близкий к рисунку (Рисунок 7).
Изменить свойства блока «Переменные состояния» задав форму матриц «А» и «В» согласно рисунку (Рисунок 13). Повторить процесс моделирования и убедиться, что графики переходных процессов совпадают.
Сохранить данный вариант проекта.
Реализация передачи данных без прямого подключения по линии связи
Основное назначение типового блока «В память» – реализация первого этапа передачи данных из одной части структурной схемы в другую без использования линий связи. Соответственно, типовой блок «Из памяти» реализует второй этап передачи данных. Если применить радиотехническую аналогию, то в механизме передачи данных блок «В память» является «передатчиком», а блок «Из памяти» – «приемником».
В SimInTech после переноса в окно проекта блока «В память» и присвоения имени переменной в оперативной памяти компьютера резервируется некий динамический массив. При запуске задачи на расчет по размерности сигнала на входе блока «В память» определяется размерность именованной переменной и под нее выделяется соответствующий объем оперативной памяти, в который в процессе моделирования будут записываться данные на каждом шаге расчета.
Если в структурной схеме присутствует типовой блок «Из памяти», то с его помощью можно считывать именованные данные из оперативной памяти и выдать их на выход блока «Из памяти». Затем посредством линий связи данные могут быть переданы на вход другого блока, расположенного в этом схемном окне.
Выполнить освоение процедур организации передачи данных без линий связи в рамках следующего задания.
В окне проекта поместить на схему два блока «В память» и блок «Субмодель» из вкладки «Субструктуры». Удалить линии связи, подключенные к блоку «Субмодель» с подписью «Параллельная САР». Разместить блоки на схеме и задать подписи блокам согласно рисунку (Рисунок 14).
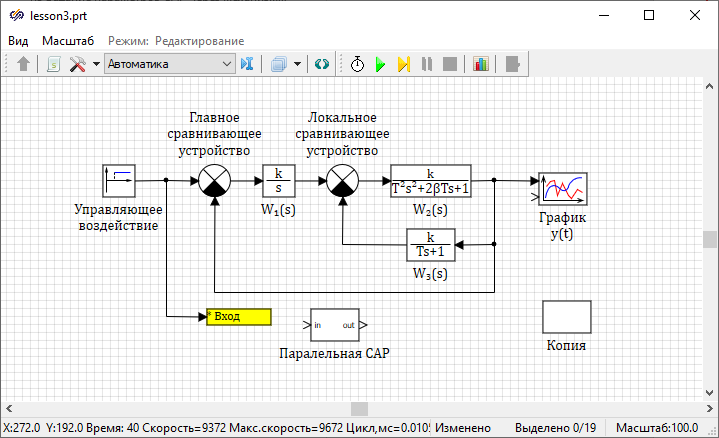
Рисунок 14. Структурная схема САР.
Нажать правой кнопкой мыши на блок «Субмодель» с подписью «Параллельная САР» и выберете пункт «Вырезать».
Зайти в блок «Субмодель» с подписью «Копия», нажать правой кнопкой мыши в свободном пространстве рабочей области субмодели и выбрать пункт «Вставить»: ранее вырезанный блок «Субмодель» появится в окне субмодели первого уровня вложенности, а содержание перенесённой субмодели перейдет во второй уровень вложенности. Проверить это, открыв субмодель с подписью «Параллельная САР».
Поместить в рабочую область субмодели с подписью «Копия» блок «В память» из библиотеки «Субструктуры», расположив его справа от блока «Субмодель». Открыть его диалоговое окно двойным нажатием на него левой кнопкой мыши и изменить имя переменной на «Выход».
Поместить в рабочую область субмодели с подписью «Копия» блок «Из памяти» из библиотеки «Субструктуры», расположив его слева от блока «Субмодель». Открыть его диалоговое окно двойным нажатием на него левой кнопкой мыши. Выделить в открывшемся диалоговом окне со списком «Все переменные» переменную «Вход» и затем нажать на синюю одинарную стрелку (направление стрелки - вправо): переменная «Вход» перейдет в список «Переменные блока» (Рисунок 15).
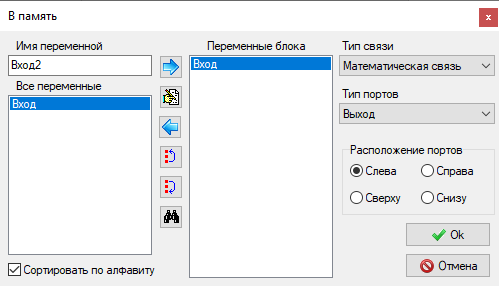
Рисунок 15. Диалоговое окно блока «Из памяти».
В этом диалоговом окне можно выбирать необходимые сигналы для считывания, переименовывать их и сортировать переменные для удобства поиска значений в списках.
Внимание:
- При закрытии диалогового окна блока «Из памяти» количество выходных портов на блоке будет равно количеству переменных в окне «Переменные блока».
- Блоки «В память» и «Из памяти» реализуют передачу как скалярных, так и векторных данных.
Соединить линиями связи блоки «Из памяти» и «В память» с субмоделью с подписью «Параллельная САР» согласно рисунку (Рисунок 16).
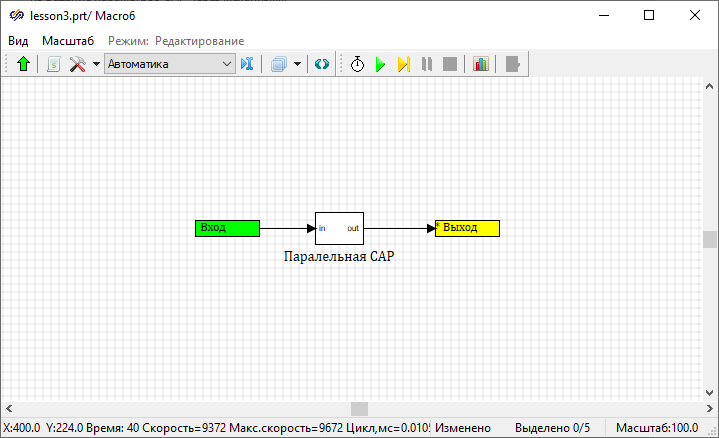
Рисунок 16. Структрная схема субмодели с подписью «Копия».
Выйти из субмодели и поместить в окно проекта блок «Из памяти» из вкладки «Субструктуры». Открыть диалоговое окно блока «Из памяти» и задать в списке «Приёмник» переменную «Выход_Y». Соединить блоки согласно рисунку (Рисунок 17).
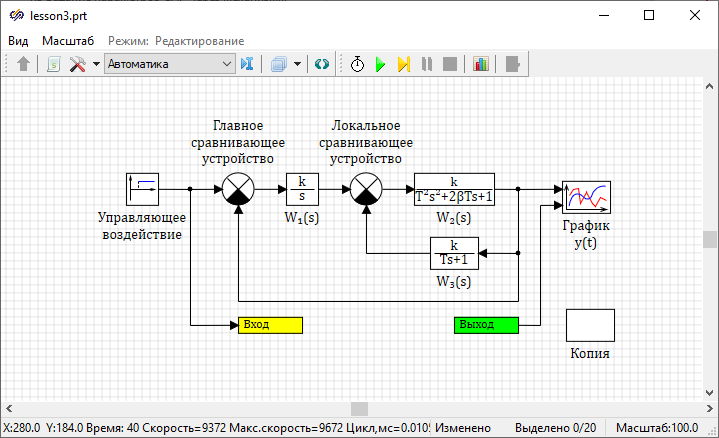
Рисунок 17. Структурная схема САР.
Запустить расчёт проекта и убедиться, что графики передаточных функций совпадают.
На этом ознакомление с процедурами реализации передачи данных с помощью памяти завершено.