Содержание лабораторной работы
В данной лабораторной работе рассматривается модель САР, разработанная в ходе выполнения
лабораторной работы №2. К САР предъявляются следующие требования по качеству переходного
процесса:
- Перерегулирование не более 3% от значения управляющего воздействия.
- Время переходного процесса менее 1500 секунд при отклонении регулируемой величины от
установившегося значения не более чем на 3%.
Время переходного процесса определяется, как момент времени, в который график переходного
процесса попал в трубку установившегося значения и больше не выходил из нее.
При значении управляющего воздействия равном 35°:
- Перерегулирование не более: 35° · 0.03 ≈ 1°.
- Трубка установившегося значения: 35° · ±0.03 ≈ ±1°.
Результаты моделирования, полученные в ходе выполнения лабораторной работы №2,
свидетельствуют о том, что САР не удовлетворяет предъявляемым требованиям. Для того, чтобы
САР удовлетворяла требованиям к качеству переходного процесса, в данной лабораторной
работе будет:
- разработана модель ПИД-регулятора;
- проведено моделирование работы САР при различных значениях коэффициентов
регулятора;
- изучено влияние значений коэффициентов ПИД-регулятора на переходный
процесс;
- проведена настройка ПИД-регулятора.
Открытие разработанного ранее проекта
Необходимо открыть проект с моделью САР, которая была разработана в ходе выполнения
лабораторной работы №2. Для этого необходимо:
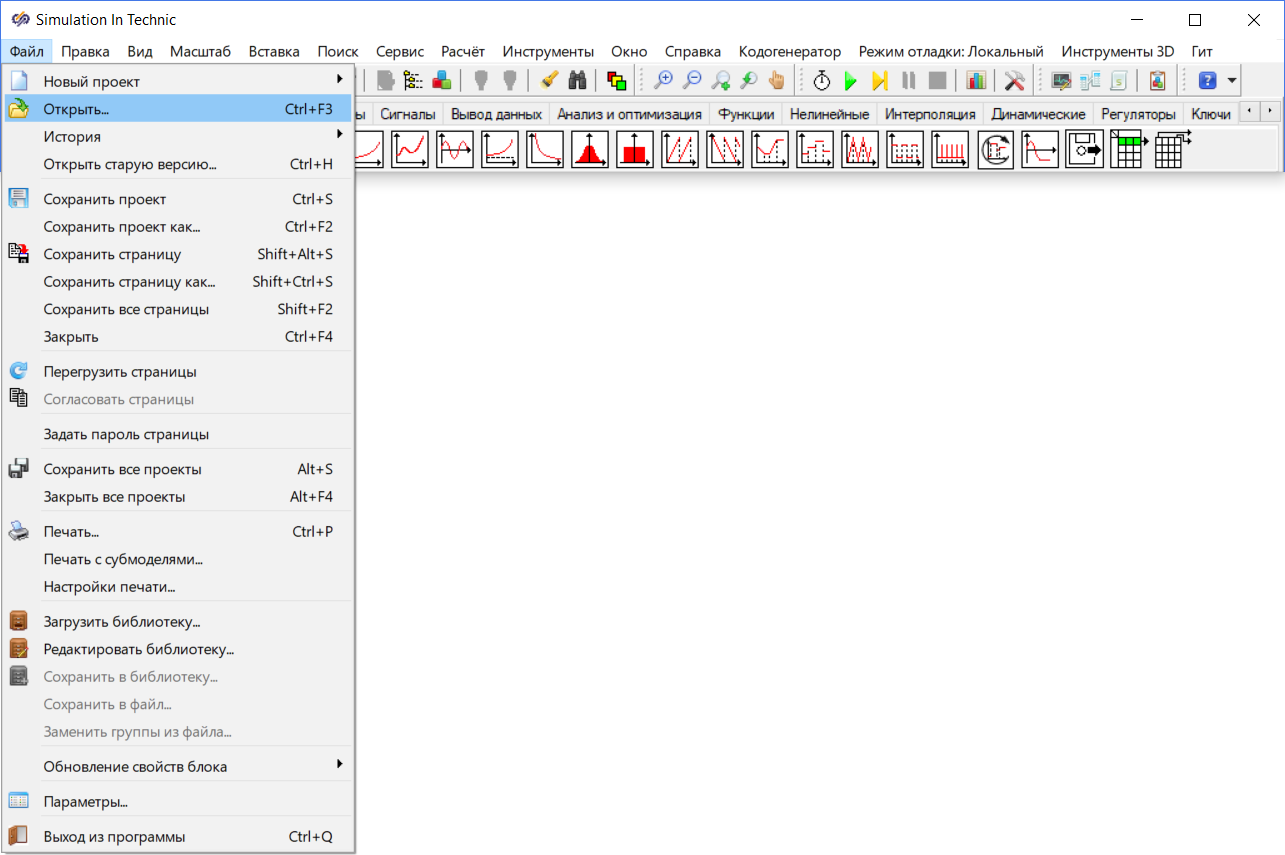
- В главном окне SimInTech нажать кнопку «Файл» и выбрать пункт
«Открыть...» (Рисунок 4).
Рисунок 4. Главное окно SimInTech c выделенным меню открытия проекта.
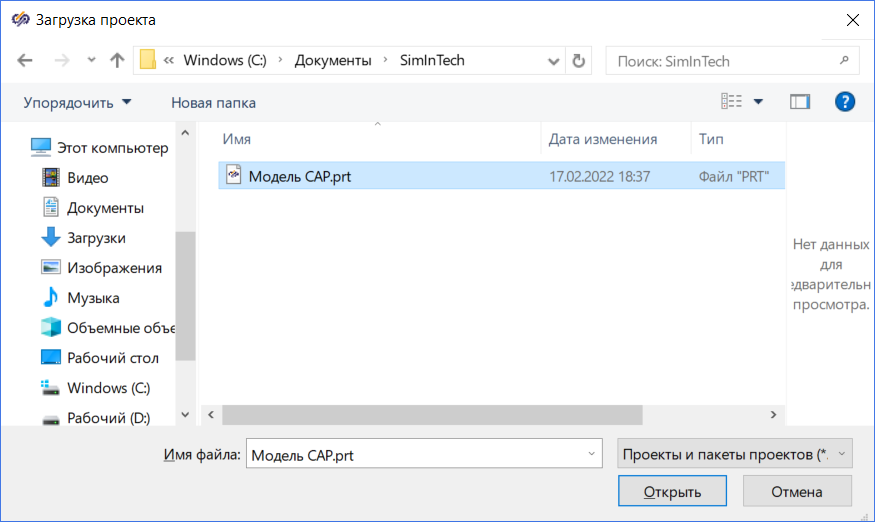
- В открывшемся окне «Загрузка проекта» необходимо перейти в директорию, в
которой был сохранен проект, выбрать проект и нажать кнопку «Открыть» (Рисунок 5).
Рисунок 5. Окно «Загрузка проекта» с выбранным проектом.
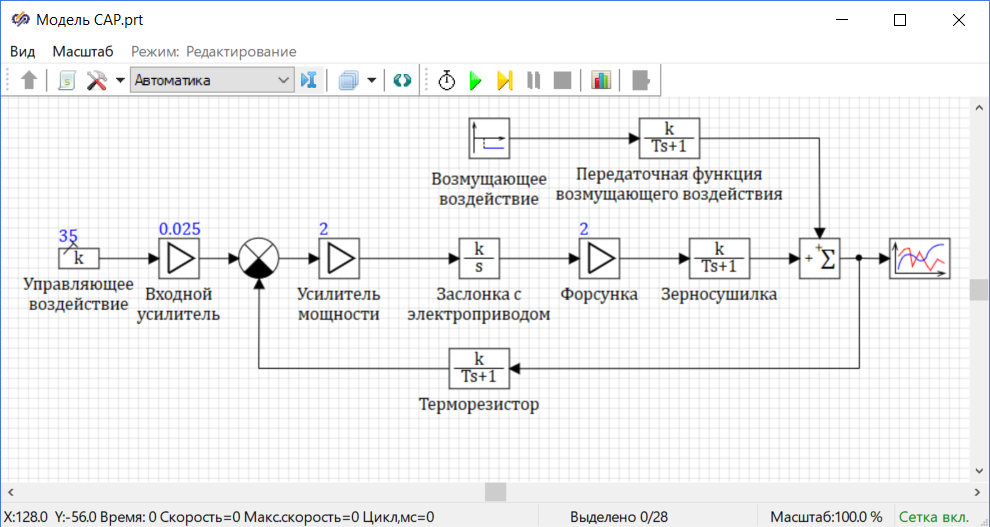
Откроется окно проекта, в котором расположена модель САР (
Рисунок 6).
Рисунок 6. Модель САР, разработанная в ходе выполнения лабораторной работы №2.
В ходе выполнения текущей лабораторной работы в модель САР будут внесены изменения. Перед
тем, как вносить изменения, необходимо сохранить проект с новым именем для того, чтобы
оставить неизмененным проект, относящийся к лабораторной работе №2.
Требуется сохранить проект с новым именем, для этого:
- В главном окне SimInTech нажать кнопку «Файл» и выбрать пункт «Сохранить
проект как...».
- В появившемся окне выбрать или при необходимости создать папку, в которую будет
сохранен данный проект.
- В поле «Имя файла» изменить имя проекта на «САР с ПИД-регулятором» и
нажать на кнопку «Сохранить».
Внесение изменений в модель САР
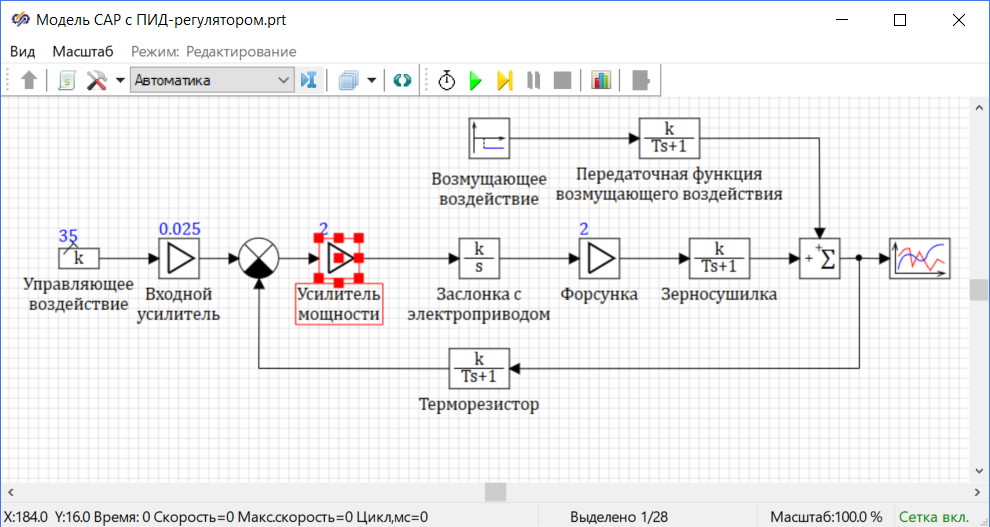
В модели САР, разработанной в ходе выполнения лабораторной работы №2, использовался
пропорциональный регулятор (блок «Усилитель» с подписью «Усилитель
мощности»). В ходе выполнения текущей лабораторной работы требуется заменить
пропорциональный регулятор на ПИД-регулятор.
Необходимо удалить блок «
Усилитель» с подписью «
Усилитель мощности» (
Рисунок 7), вместо него будет
разработана модель ПИД-регулятора.
Рисунок 7. Окно проекта с выделенным блоком, который необходимо удалить.
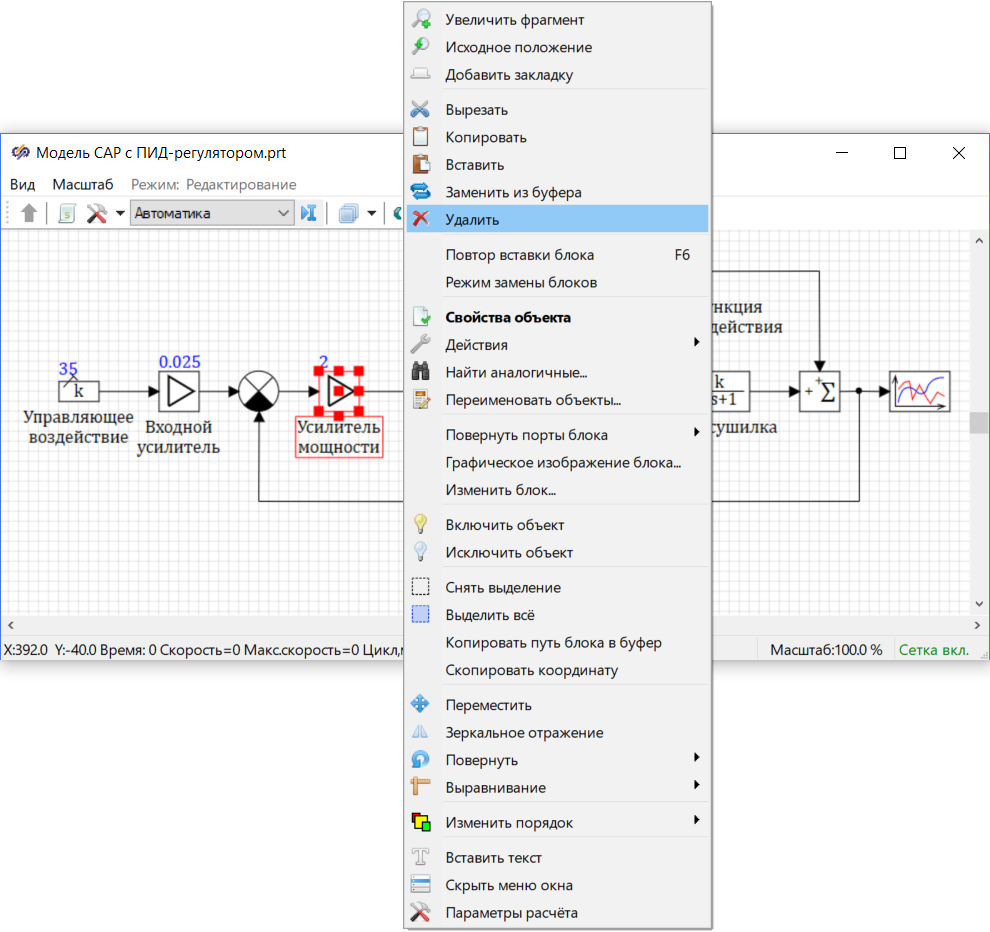
Для того, чтобы удалить блок, необходимо:
- Одинарным нажатием левой кнопкой мыши выделить блок «Усилитель» с подписью
«Усилитель мощности».
- Одинарным нажатием правой кнопкой мыши по выделенному блоку вызвать контекстное меню
блока.
- В контекстном меню блока выбрать пункт «Удалить» (Рисунок 8).
Рисунок 8. Окно проекта пунктом «Удалить», выделенным в контекстным меню блока.
Аналогичным образом необходимо удалить две линии связи, которые были подключены к
удаленному блоку.
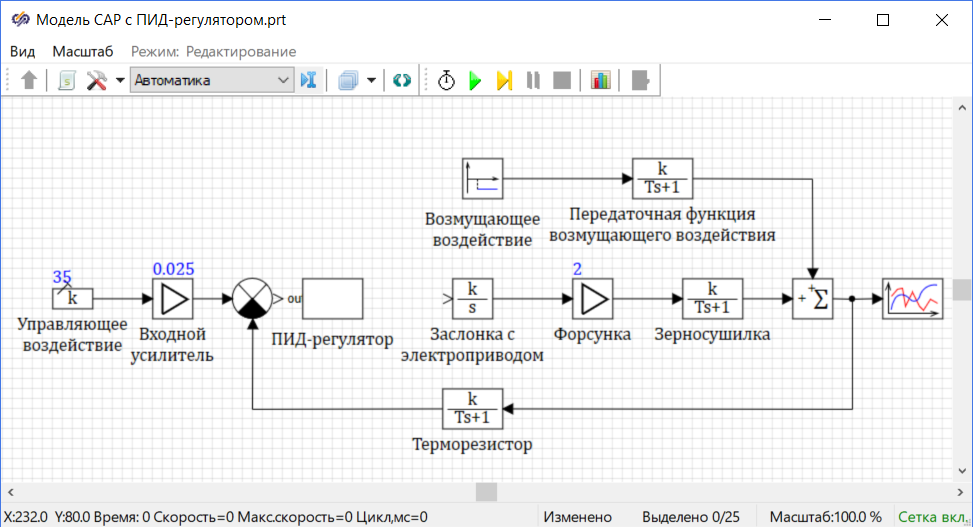
Необходимо разработать модель ПИД-регулятора в виде одного блока. Для этого необходимо
добавить на схему блок «
Субмодель» из вкладки «
Субструктуры», задать ему
подпись «
ПИД-регулятор» и разместить на схеме согласно рисунку (
Рисунок 9).
Рисунок 9. Окно проекта с добавленным блоком «Субмодель».
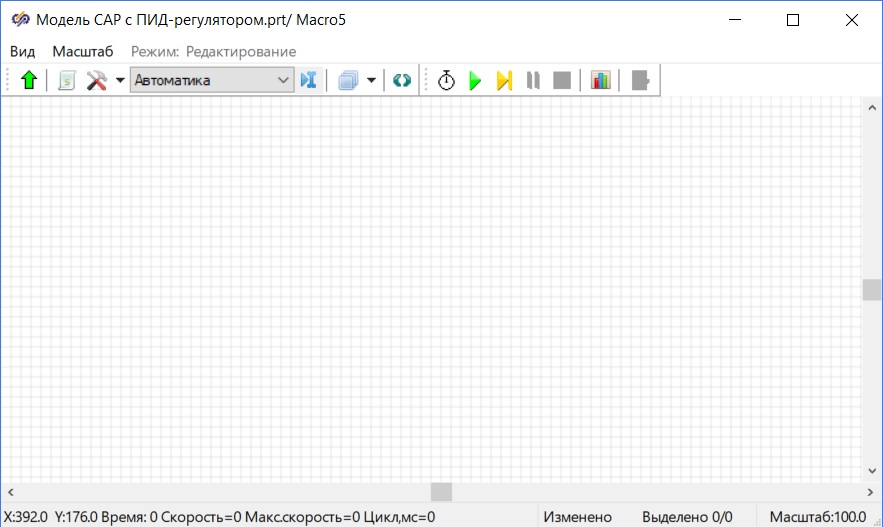
Двойным нажатием по блоку «
Субмодель» необходимо зайти в субмодель. В окне проекта
откроется рабочая область блока «
Субмодель» (
Рисунок 10).
Рисунок 10. Рабочая область блока «Субмодель».
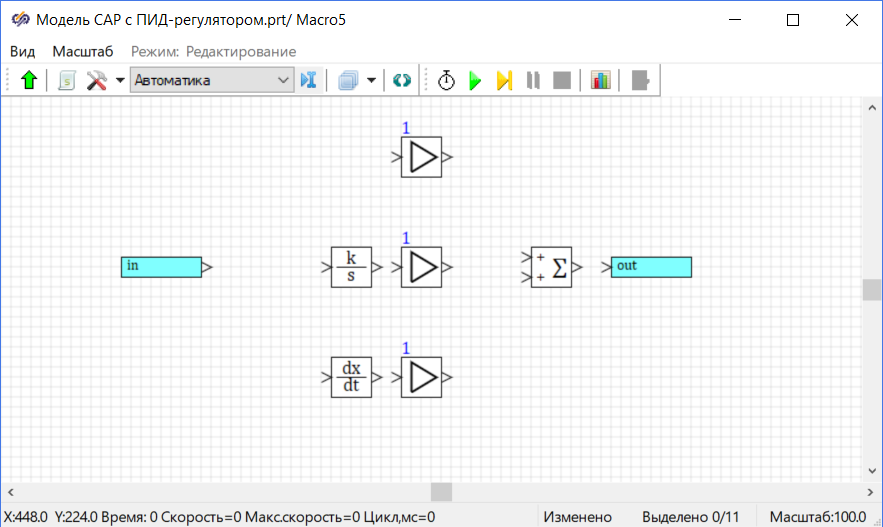
Необходимо добавить в рабочую область субмодели и разместить, согласно рисунку (
Рисунок 11), следующие блоки:
- 3 блока «Усилитель», 1 блок «Сумматор» из вкладки «Операторы».
Данные блоки будут моделировать работу ПИД-регулятора.
- 1 блок «Интегратор», 1 блок «Производная» из вкладки
«Динамические». Данные блоки будут моделировать интегрирующую и
дифференцирующую составляющие ПИД-регулятора.
- 1 блок «Входной порт», 1 блок «Выходной порт» из вкладки
«Субструктуры». Данные блоки необходимы для приема и передачи данных через
порты блока «Субмодель».
Рисунок 11. Окно проекта с добавленными в субмодель блоками.
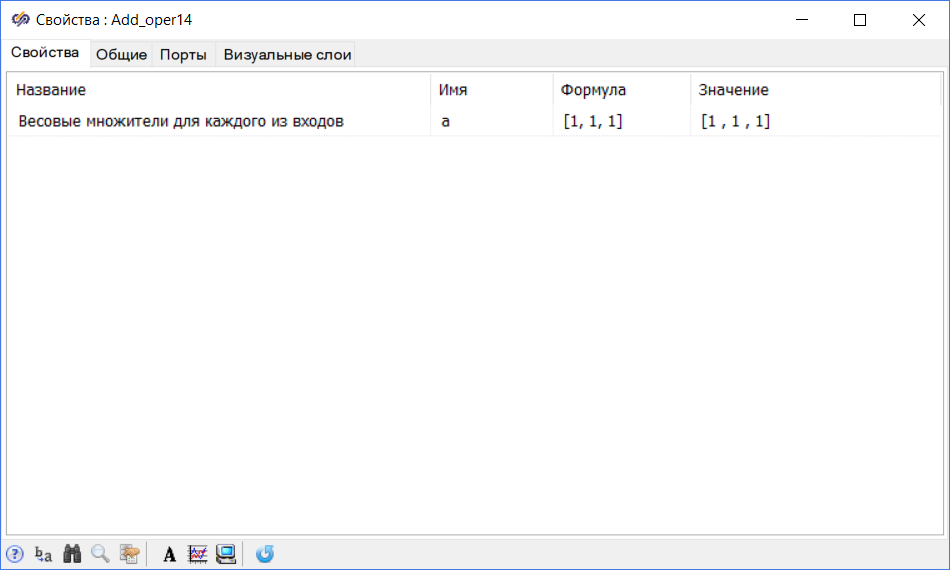
Необходимо увеличить количество портов блока «
Сумматор». Для этого необходимо
открыть окно свойств данного блока и в поле «
Формула» задать значение свойства
«
Весовые множители для каждого из входов» равным «
[1, 1, 1]» (
Рисунок 12).
Рисунок 12. Окно свойств блока «Сумматор».
После этого количество портов блока «Сумматор» изменится.
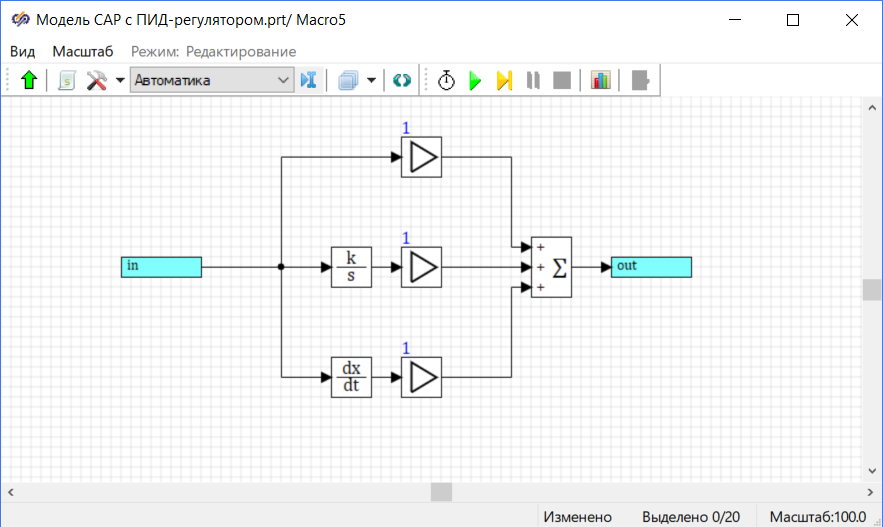
Необходимо соединить блоки линиями связи согласно рисунку (
Рисунок 13).
Рисунок 13. Окно проекта с соединенными блоками.
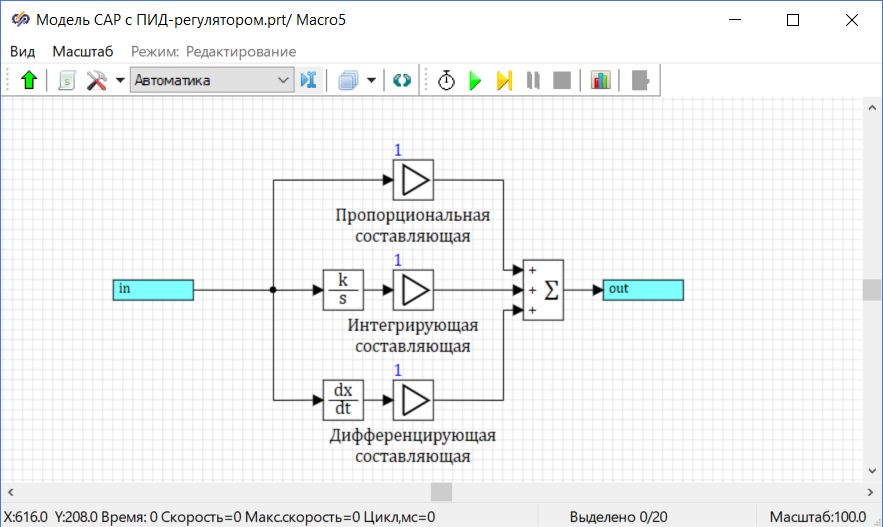
Необходимо задать подписи к блокам «
Усилитель» согласно рисунку (
Рисунок 14).
Рисунок 14. Окно проекта с заданными подписями блоков.
Данные блоки будут моделировать коэффициенты усиления пропорциональной, интегрирующей и
дифференцирующей составляющих регулирующего воздействия ПИД-регулятора соответственно
подписям данных блоков.
Необходимо задать значения коэффициентов усиления регулятора, что будет соответствовать
П-регулятору:
Для этого необходимо:
- Для блока «Усилитель» с подписью «Пропорциональная составляющая»
задать свойству «Коэффициенты усиления» значение «2».
- Для блока «Усилитель» с подписью «Интегрирующая составляющая» задать
свойству «Коэффициенты усиления» значение «0».
- Для блока «Усилитель» с подписью «Дифференцирующая составляющая»
задать свойству «Коэффициенты усиления» значение «0».
Текущая настройка регулятора соответствует использованию усилителя мощности в исходной
модели САР. В ходе выполнения лабораторной работы будет произведена настройка регулятора с
целью повышения качества регулирования.
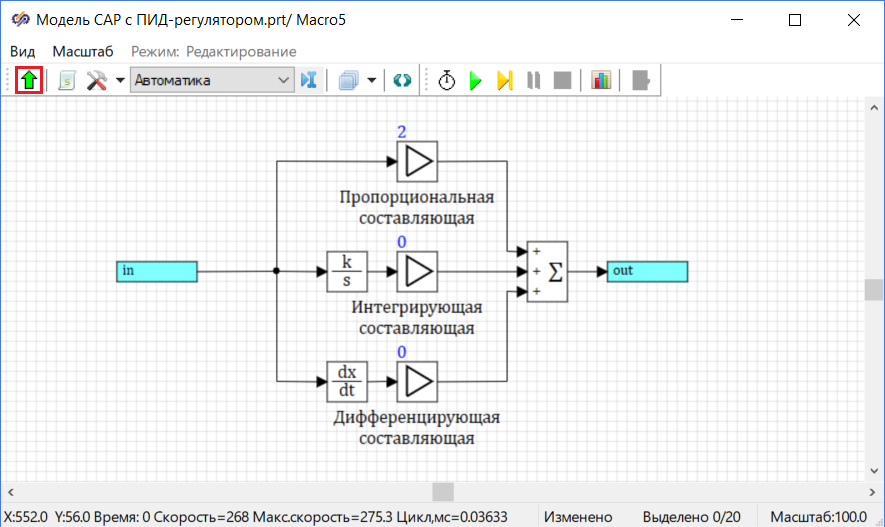
Необходимо выйти из субмодели одинарным нажатием левой кнопкой мыши по кнопке «
Выход
из субмодели» на панели кнопок окна проекта (
Рисунок 15).
Рисунок 15. Окно проекта с выделенной кнопкой «Выход из субмодели».
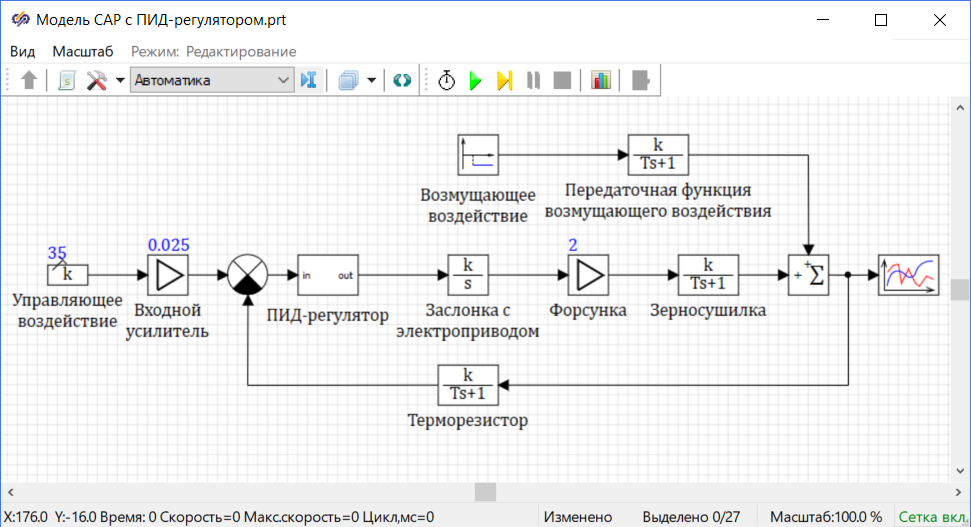
Необходимо соединить порты блока «
Субмодель» с другими блоками на схеме согласно
рисунку (
Рисунок 16).
Рисунок 16. Окно проекта с соединенными блоками.
В ходе настройки регулятора необходимо оценивать график реакции САР на ступенчатое
управляющее воздействие. Для того, чтобы исключить влияние возмущающего воздействия на
переходный процесс САР, необходимо для блока «Ступенька» с подписью «Возмущающее
воздействие» задать значение свойства «Конечное состояние» равным
«0».
Перед тем, как приступать к выполнению следующего пункта лабораторной работы, необходимо
сохранить проект.
Моделирование работы САР и настройка ПИД-регулятора.
Необходимо провести моделирование и настроить ПИД-регулятор таким образом, чтобы САР
удовлетворяла требованиям к качеству переходного процесса:
- Перерегулирование не более 1°.
- Время переходного процесса не более 1500 секунд при трубке установившегося значения
±1°.
Требуется запустить процесс моделирования нажатием на кнопку «
Пуск».После
окончания процесса моделирования двойным нажатием левой кнопкой мыши по блоку
«
Временной график» открыть график переходного процесса температуры воздуха в
зерносушилке. График должен выглядеть согласно рисунку (
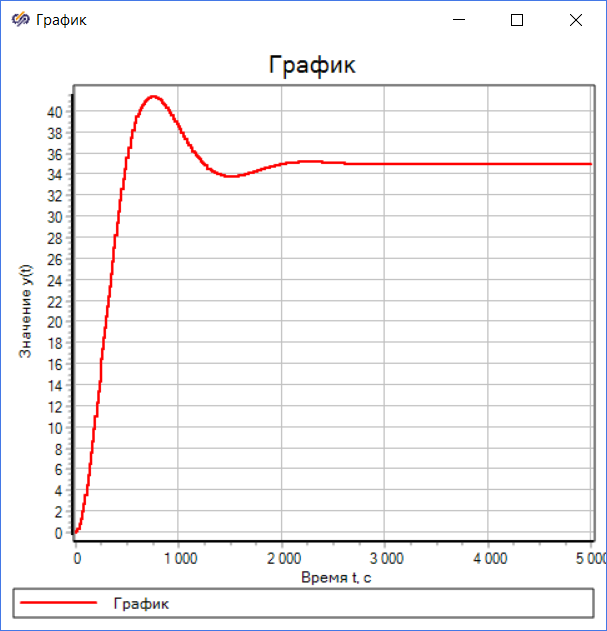
Рисунок 17).
Рисунок 17. График переходного процесса САР при KP = 2; KI = 0;
KD = 0.
При текущих настройках регулятора, согласно графику, максимальное значение
температуры достигает примерно 41°, то есть перерегулирование составляет примерно 6°.
График переходного процесса попал в трубку ±1° от установившегося значения в момент
времени примерно 1750 секунд и больше не выходил из нее, то есть время переходного
процесса превышает 1500 секунд.
Необходимо уменьшить значение коэффициента усиления пропорциональной составляющей и изучить ее
влияние на переходный процесс. Требуется задать значения коэффициентов усиления
ПИД-регулятора:
Для этого необходимо зайти внутрь блока
«Субмодель» и изменить значения свойств соответствующих блоков
«Усилитель».
Необходимо запустить моделирование и после окончания процесса
моделирования открыть график переходного процесса САР. График должен выглядеть согласно
рисунку (
Рисунок 18).
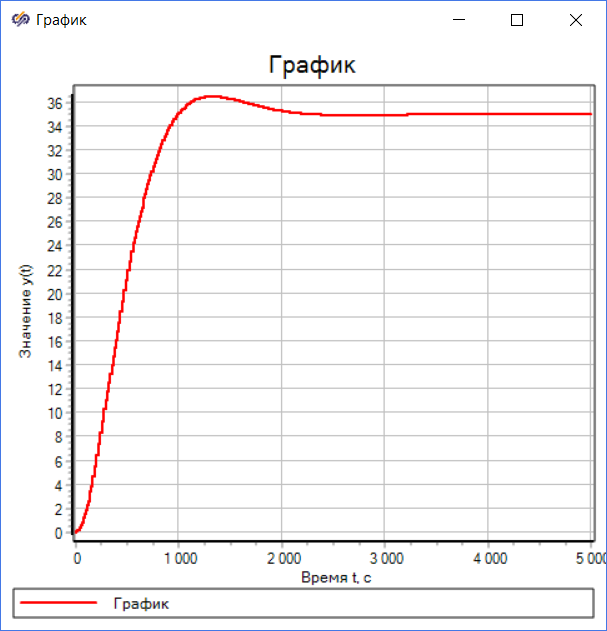
Рисунок 18. График переходного процесса САР при KP = 1; KI = 0;
KD = 0.
При текущих настройках регулятора перерегулирование составляет примерно 2°,
время переходного процесса превышает 1500 секунд. После уменьшения значения коэффициента
усиления пропорциональной составляющей колебательность переходного процесса уменьшилась, а
время переходного процесса практически не изменилось.
Необходимо добавить интегрирующую составляющую в регулирующее воздействие и изучить ее влияние на
переходный процесс. Требуется задать значения коэффициентов усиления ПИД-регулятора, что
соответствует ПИ-регулятору:
Требуется запустить моделирование и после
окончания процесса моделирования открыть график переходного процесса САР. График должен
выглядеть согласно рисунку (
Рисунок 19).
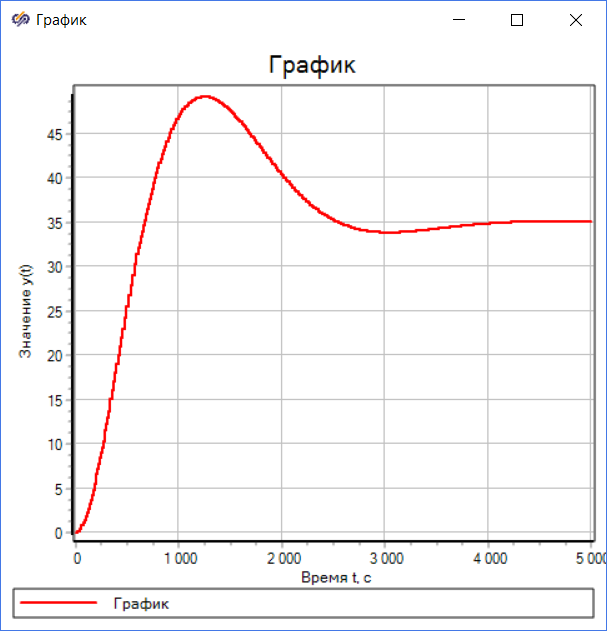
Рисунок 19. График переходного процесса САР при KP = 1; KI = 0.001;
KD = 0.
При текущих настройках регулятора перерегулирование составляет примерно 13°,
время переходного процесса многократно превышает 1500 секунд. После увеличения значения
коэффициента усиления интегрирующей составляющей увеличились колебательность и время
переходного процесса из-за особенностей объекта управления.
Необходимо изучить влияние
дифференцирующей составляющей на переходный процесс, для этого требуется задать значения
коэффициентов усиления ПИД-регулятора, что соответствует ПД-регулятору:
Требуется запустить моделирование и после
окончания процесса моделирования открыть график переходного процесса САР. График должен
выглядеть согласно рисунку (
Рисунок 20).
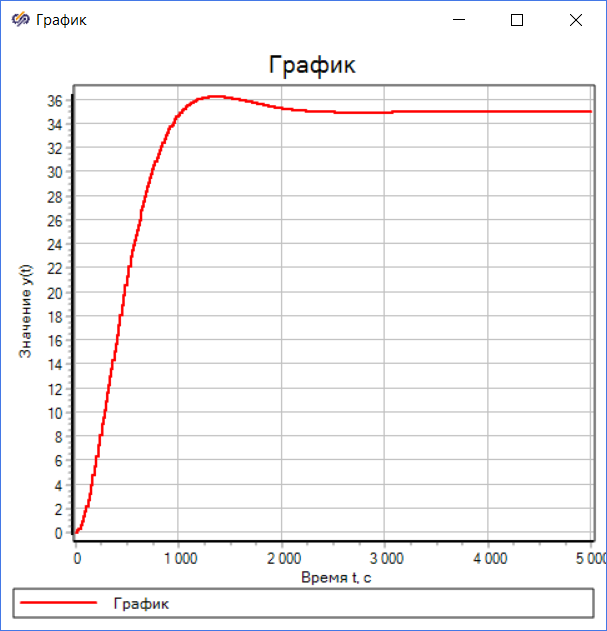
Рисунок 20. График переходного процесса САР при KP = 1; KI = 0.;
KD = 10.
При текущих настройках регулятора перерегулирование составляет примерно 1.5°, время переходного
процесса превышает 1500 секунд. Увеличение коэффициента усиления дифференцирующей
составляющей привело к уменьшению колебательности и времени переходного процесса. Для еще
большего уменьшения колебательности и времени переходного процесса необходимо увеличить
значение коэффициента усиления дифференцирующей составляющей регулятора. Требуется задать
значения коэффициентов усиления ПИД-регулятора:
Требуется запустить моделирование и после
окончания процесса моделирования открыть график переходного процесса САР. График должен
выглядеть согласно рисунку (
Рисунок 21).
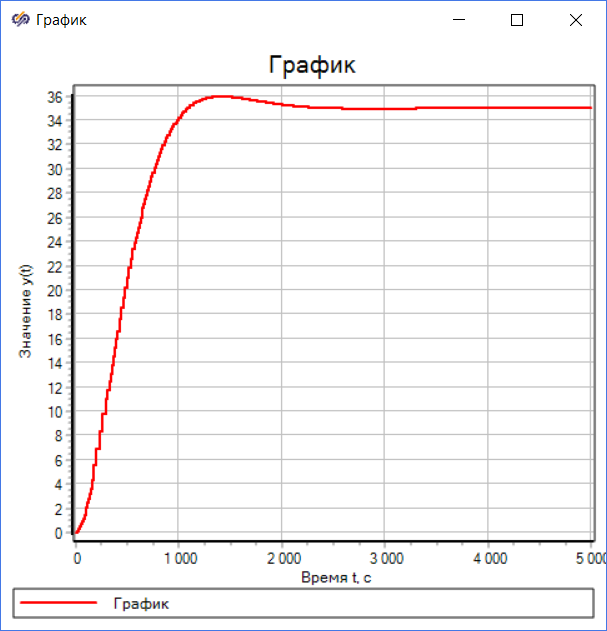
Рисунок 21. График переходного процесса САР при KP = 1; KI = 0;
KD = 25.
При текущих настройках регулятора перерегулирование не превышает 1°, время
переходного процесса не превышает 1500 секунд. САР удовлетворяет предъявляемым требованиям
к качеству регулирования. Настройка ПИД-регулятора проведена успешно.
Перед
завершением выполнения лабораторной работы необходимо сохранить проект.

 Регулирующее воздействие ПИ–регулятора равно сумме пропорциональной и интегрирующей составляющих (Рисунок 1).
Регулирующее воздействие ПИ–регулятора равно сумме пропорциональной и интегрирующей составляющих (Рисунок 1).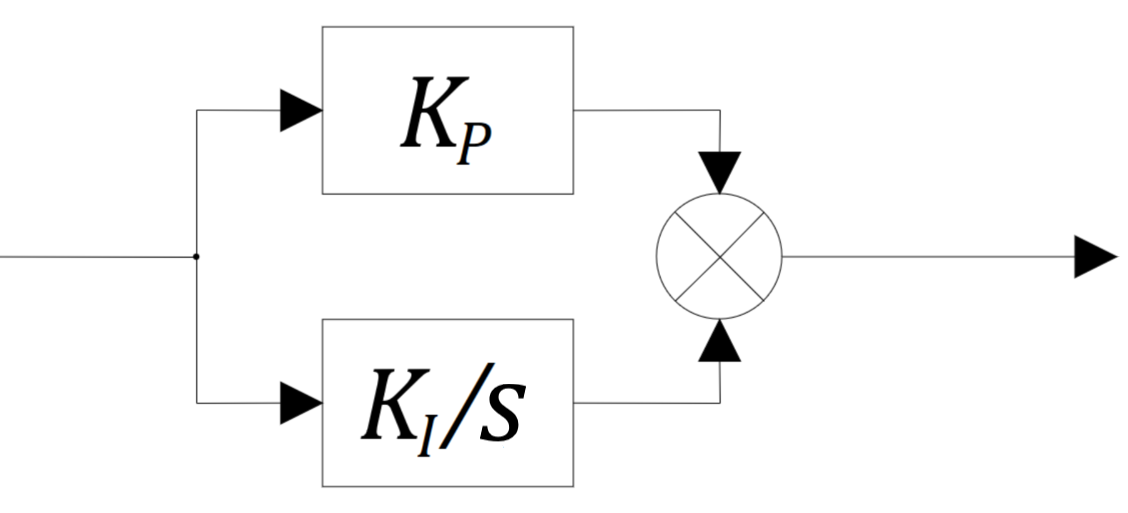

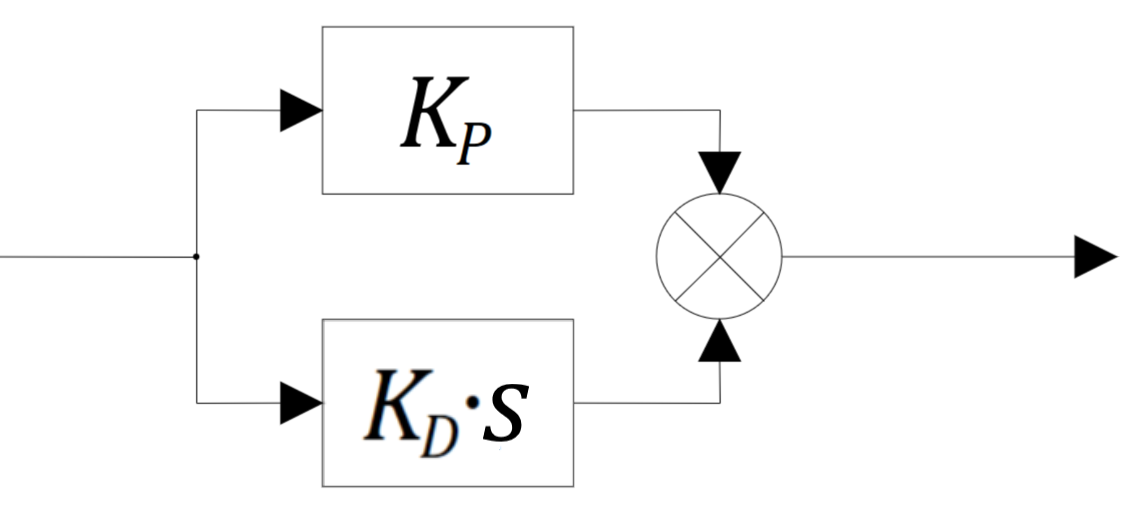
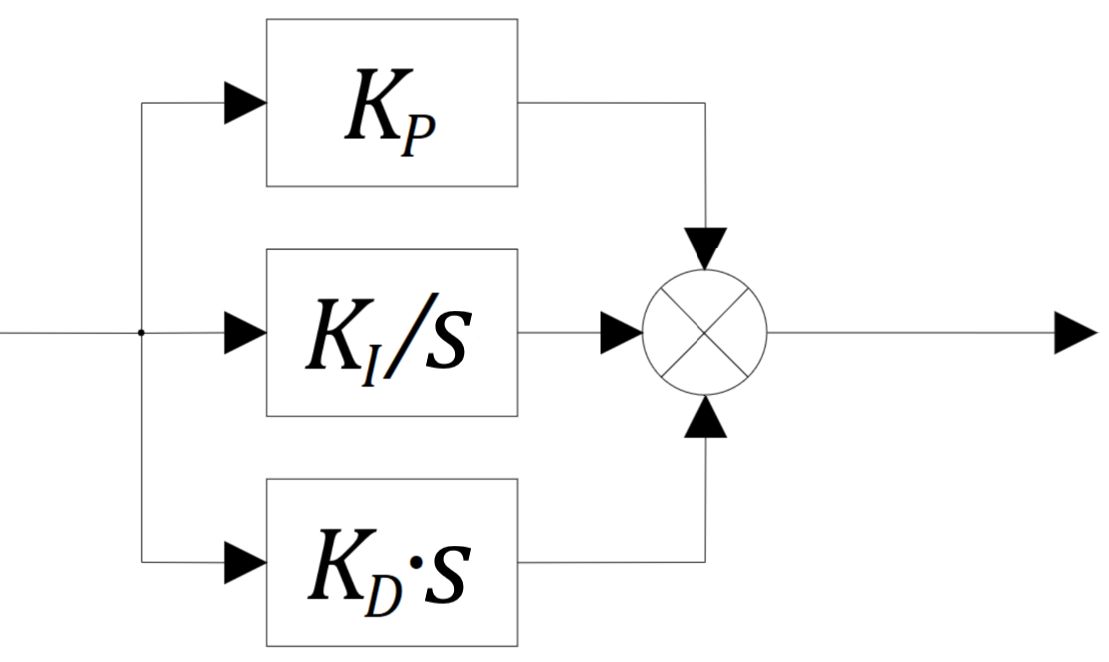
 Регулирующее воздействие ПИД–регулятора равно сумме пропорциональной, интегрирующей и дифференцирующей составляющих (Рисунок 3).
Регулирующее воздействие ПИД–регулятора равно сумме пропорциональной, интегрирующей и дифференцирующей составляющих (Рисунок 3).