Лабораторная работа №4.
Введение
Позиционные (релейные) регуляторы вырабатывают сигнал, который соответствует одному из нескольких положений (позиций) исполнительного элемента. Этих положений может быть два, три и более, соответственно, различают двух–, трех– и многопозиционные регуляторы.
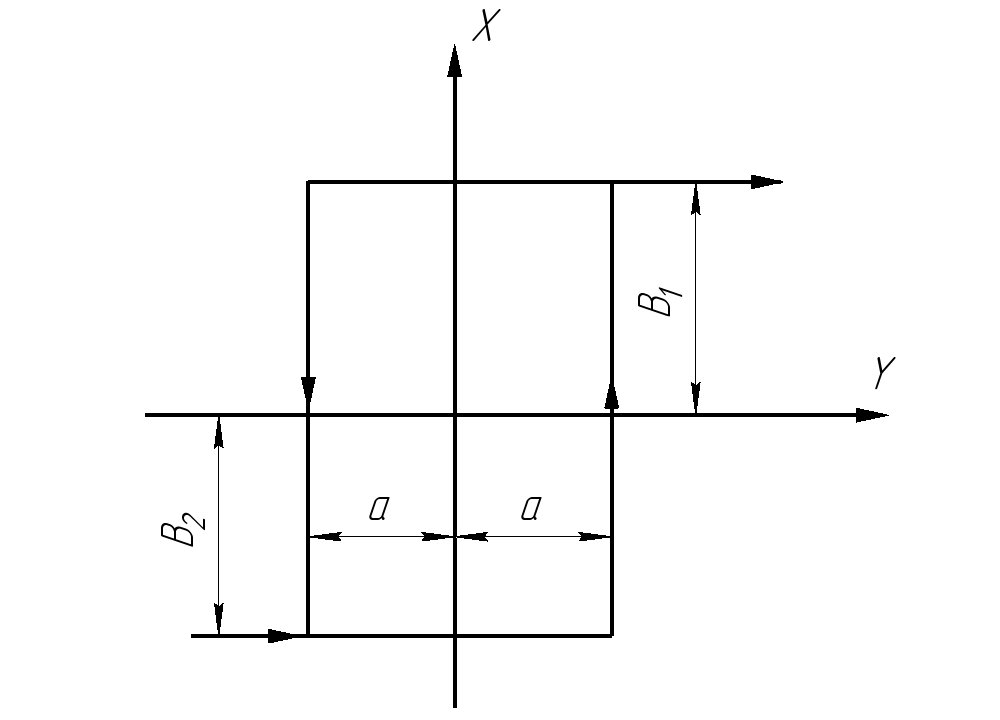
Рисунок 1. Статическая характеристика двухпозиционного регулятора.
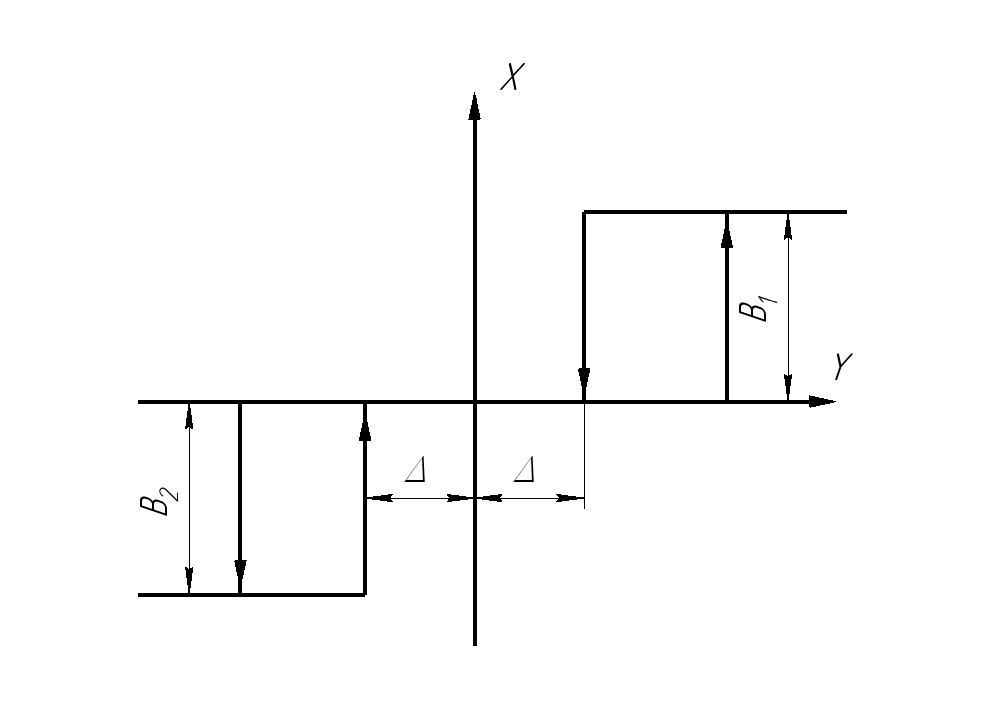
Рисунок 2. Статическая характеристика трехпозиционного регулятора.
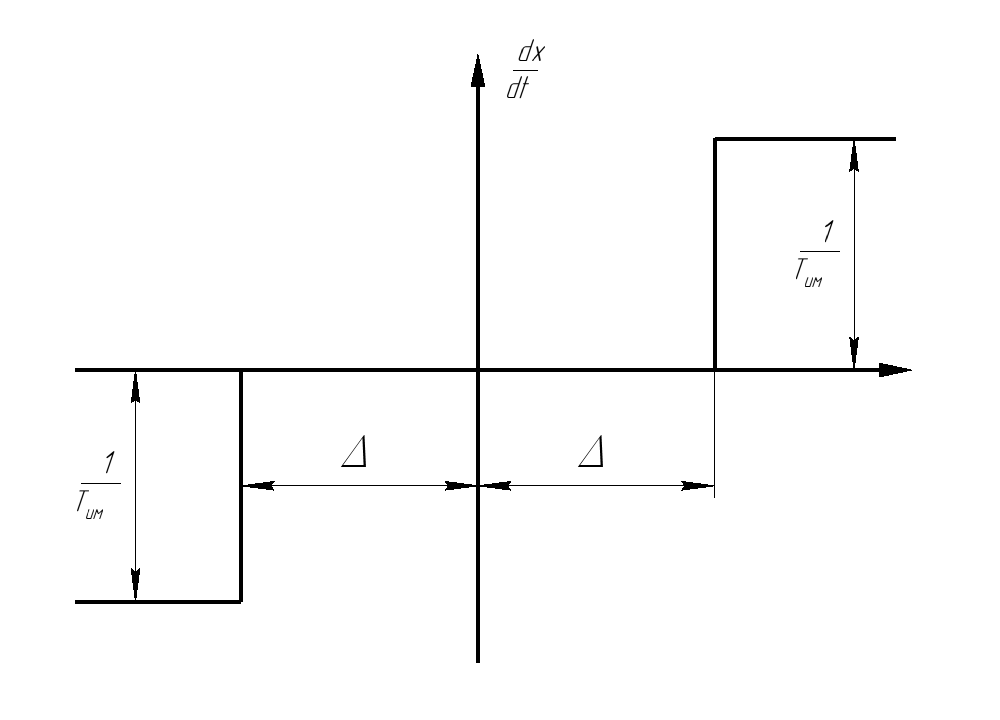
Рисунок 3. Статическая характеристика регулятора с исполнительным механизмом.
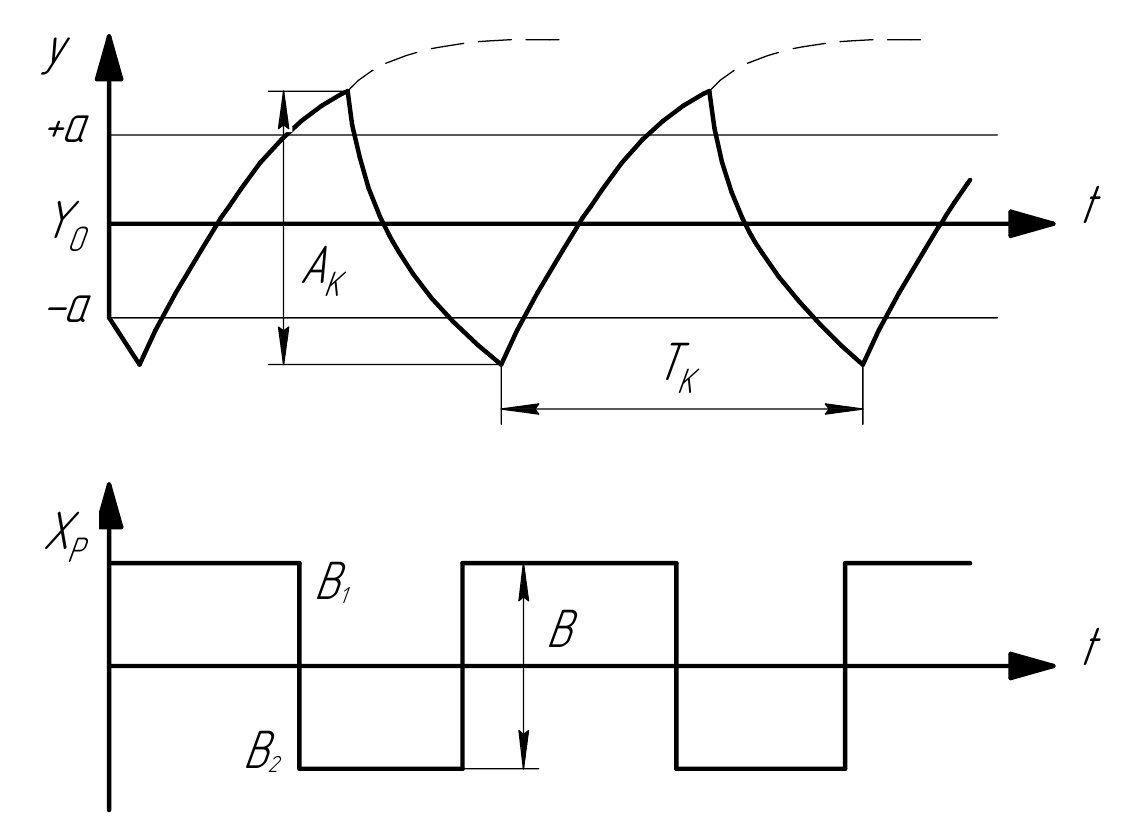
Рисунок 4. Динамика двухпозиционного регулирования статического объекта с запаздыванием.
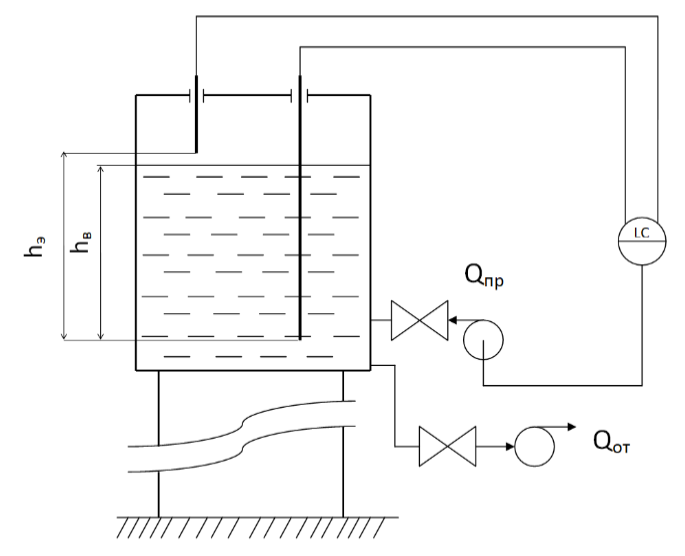
На практике статическая характеристика двухпозиционного релейного регулятора часто несимметрична относительно начала координат, т. е. приток не равен оттоку. В этом случае амплитуды автоколебаний для притока и оттока не будут равны между собой и, следовательно, среднее значение регулируемой величины у не будет соответствовать уставке. В этой связи задание (уставку) регулятору необходимо скомпенсировать.
- изменяют зону нечувствительности (ширину петли) релейного элемента;
- изменяют значения управляющего воздействия;
- вводят динамические элементы в схему регулятора.
Уменьшить ширину петли возможно, например, изменив натяжение отбрасывающей пружины электромагнитного реле, и другими способами.
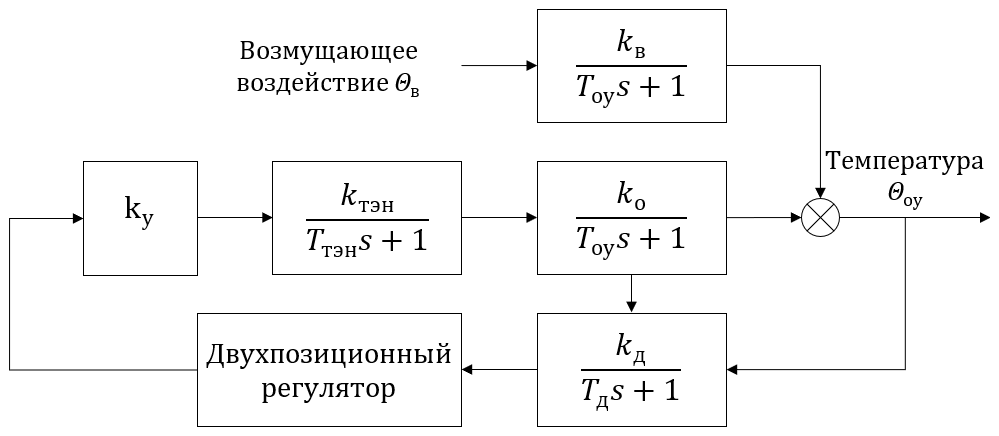
Чтобы повысить точность регулирования, в контур регулирования вводят дифференцирующие элементы, а релейный регулятор охватывают инерционной положительной обратной связью. Если в схеме имеется датчик значения регулируемой величины, то помимо него включают датчик скорости изменения регулируемой величины (дифференцирующий элемент). В этом случае суммарный сигнал поступает в регулятор, и он срабатывает с упреждением, компенсируя таким образом влияние запаздывания объекта. Например, если необходимо регулировать температуру объекта, который снабжен электронагревательным устройством, то в цепь питания нагревателя последовательно включают катушку дополнительного подогрева пластин биметаллического датчика температуры (положительная инерционная связь). В этом случае регулятор сработает раньше, чем без дополнительной катушки, и таким упреждением уменьшит амплитуду автоколебаний и повысит точность регулирования. Такого рода обратная связь учитывает также изменение притока регулирующего воздействия и снижает его влияние на точность регулирования. Также повысить качество регулирования возможно неполным притоком и (или) оттоком энергии. Например, при включении регулятора исполнительный элемент выдает полную мощность для быстрого выхода в зону требуемых значений регулируемой величины, а затем процесс двухпозиционного регулирования обеспечивается при полной и частичной мощности управляющего воздействия. Аналогичный эффект достигается и при включении ступенчатого импульсного прерывателя в выходные цепи регулятора (релейно–импульсное регулирование).
Цель работы:
- Закрепить знания о нелинейных позиционных регуляторах и релейных системах автоматического регулирования.
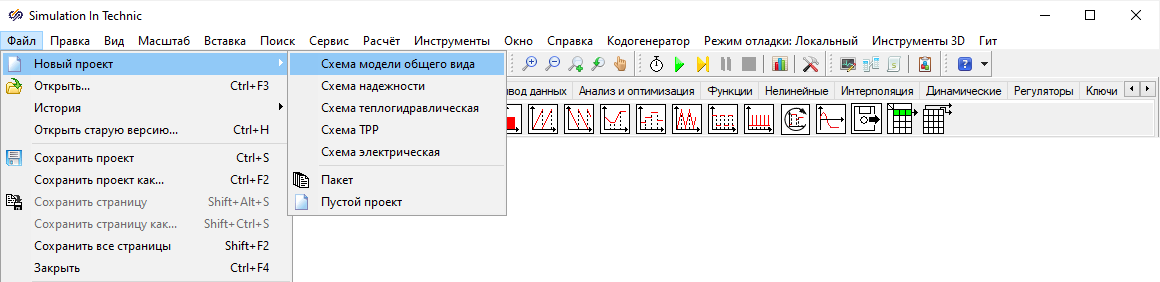
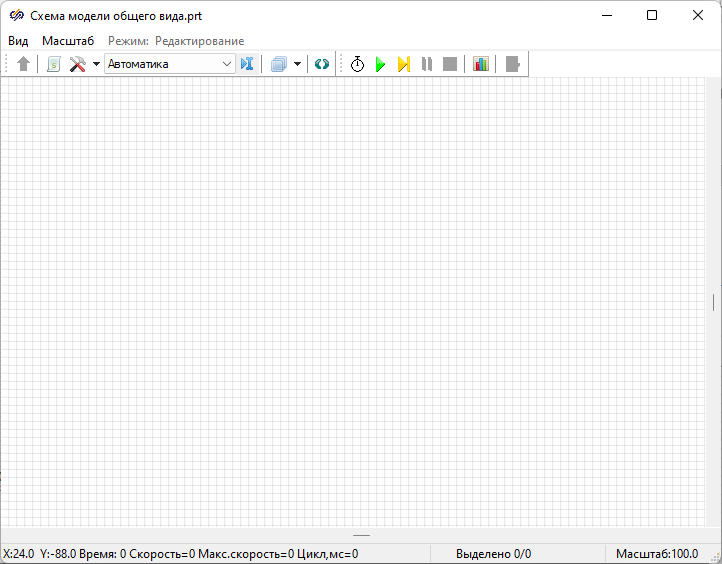
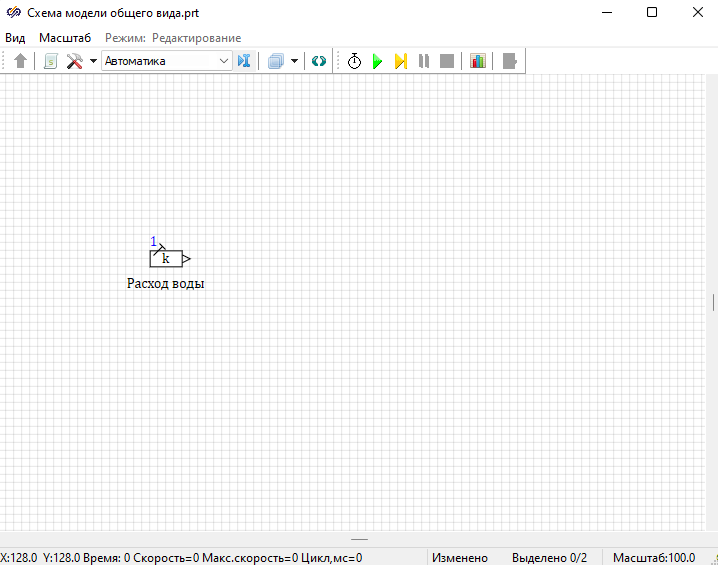
- Получить практические навыки их моделирования в SimInTech.
Задачи работы:
- Изучить работу двухпозиционных регуляторов.
- Исследовать влияние возмущающего воздействия на устойчивость переходного процесса САР.
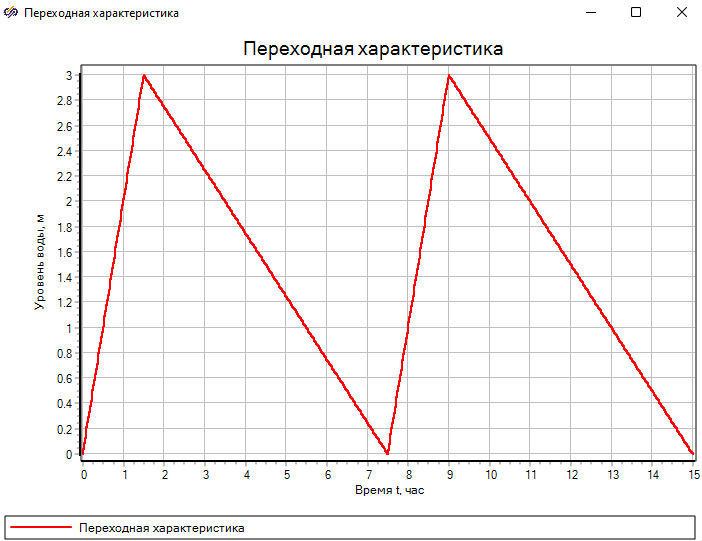
- Построить графики реакций САР на различное возмущающее воздействие.