Оптимизация коэффициентов ПИД-регулятора с учетом времени переходного процесса
Описание демо-примера
Расположение
SimInTech\Demo\Оптимизация\Оптимизация коэффициентов ПИД-регулятора с учетом времени переходного процесса\Оптимизация коэффициентов ПИД-регулятора с учетом времени переходного процесса.prt
Описание
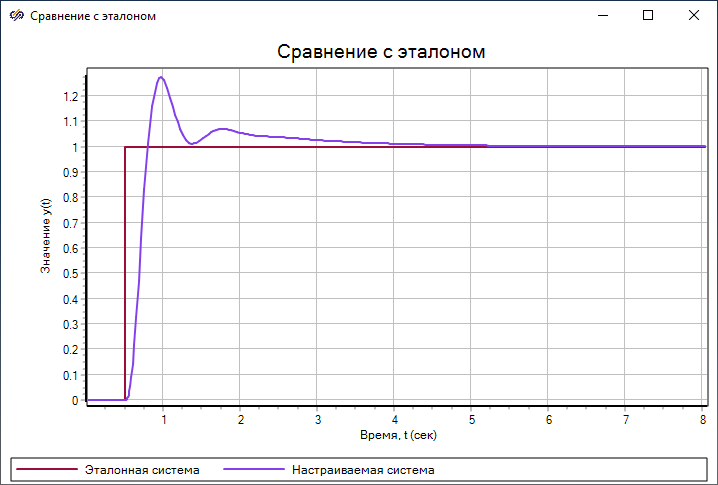
Данный проект демонстрирует применение блока "Оптимизатор" библиотеки "Анализ и оптимизация" для подбора параметров ПИД-регулятора, чтобы удовлетворить критериям оптимизации, в том числе времени переходного процесса.
ПИД-регулятор задается с помощью трех групп блоков, состоящих из блоков "Усилитель" и для интегрирующего и дифференцирующего звеньев дополнительно блоков "Интегратор" и "Инерционно-дифференцирующее звено" соответственно.
Коэффициенты в блоках "Усилитель" задаются в виде переменных, которые рассчитываются с помощью блока "Оптимизатор".
Объект управления состоит из трех инерционных звеньев 1-го порядка и интегратора последовательно соединенных между собой.
В данном примере параметрами оптимизации является коэффициенты усиления ПИД-составляющих регулятора, а критерием оптимизации — время переходного процесса и выход системы.