О рычагах вообще
Рычаг - балка, соединенная с землей с помощью шарнира или оси, называемой точкой опоры. Идеальный рычаг не рассеивает и не накапливает энергию, что означает отсутствие трения в шарнире или изгиба балки. В этом случае мощность, подаваемая на рычаг, равна выходной мощности, а отношение выходной силы к входной определяется как отношение расстояний от точки опоры до точек приложения этих сил (см. закон рычага). В библиотеке механики реализована именно такая модель рычага. Более того, принимается допущение что подвижные части рычага, к которым прикреплена нагрузка или усилие, движутся всегда прямолинейно (а не по дуге окружности), и параллельно друг другу. Такое допущение следует иметь в виду, и его можно считать верным только для относительно небольших углов поворота рычага. Либо (другая интерпретация допущения) - нагрузки на рычаг всегда перпендикулярны балке.
Рычаги классифицируются по относительному положению точки опоры, усилию и сопротивлению (или нагрузке). Входную силу принято называть усилием, а выходную силу - нагрузкой или сопротивлением. Это позволяет различать три класса рычагов по относительному расположению точки опоры, сопротивлению и усилию. Механическое преимущество рычага - отношение выходной силы к входной.
Класс 1: точка опоры между усилием и сопротивлением. Усилие прикладывается с одной стороны от оси, а сопротивление (или нагрузка) с другой стороны. Примеры: детские качели, лом, ножницы. Механическое преимущество может быть >, < или = 1.
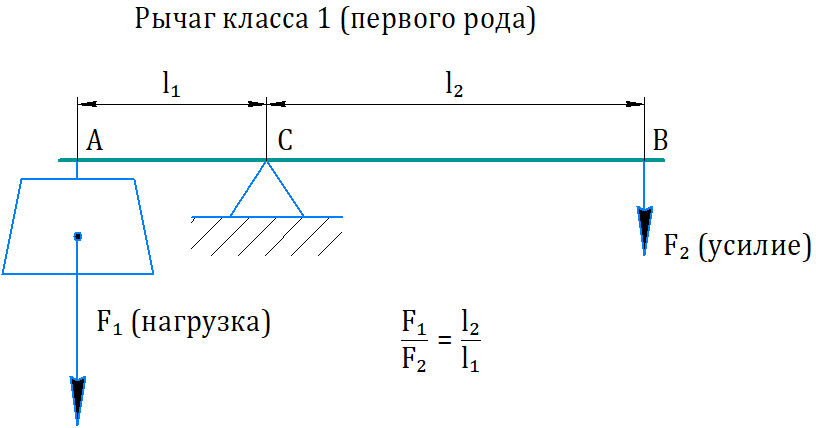
Рисунок 1. Рычаг класса 1
Класс 2: сопротивление (или нагрузка) между усилием и точкой опоры: усилие прикладывается с одной стороны от сопротивления, и точка опоры расположена с другой стороны. Примеры: тачка (точка опоры — колесо), открывалка для бутылок, педали тормоза автомобиля. Плечо груза меньше, чем плечо усилия, и механическое преимущество всегда > 1. Такой класс рычага называют ещё рычагом умножения силы.
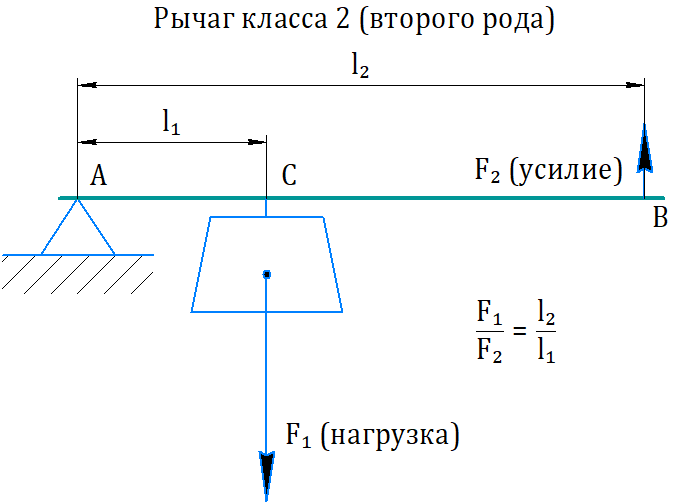
Рисунок 2. Рычаг класса 2
Класс 3: усилие между точкой опоры и сопротивлением: сопротивление (или нагрузка) находится на одной стороне усилия, а точка опоры расположена на другой стороне. Примеры: пинцет, молоток. Плечо усилия всегда меньше плеча нагрузки. Механическое преимущество всегда < 1. Этот класс также называют рычагом умножения скорости.
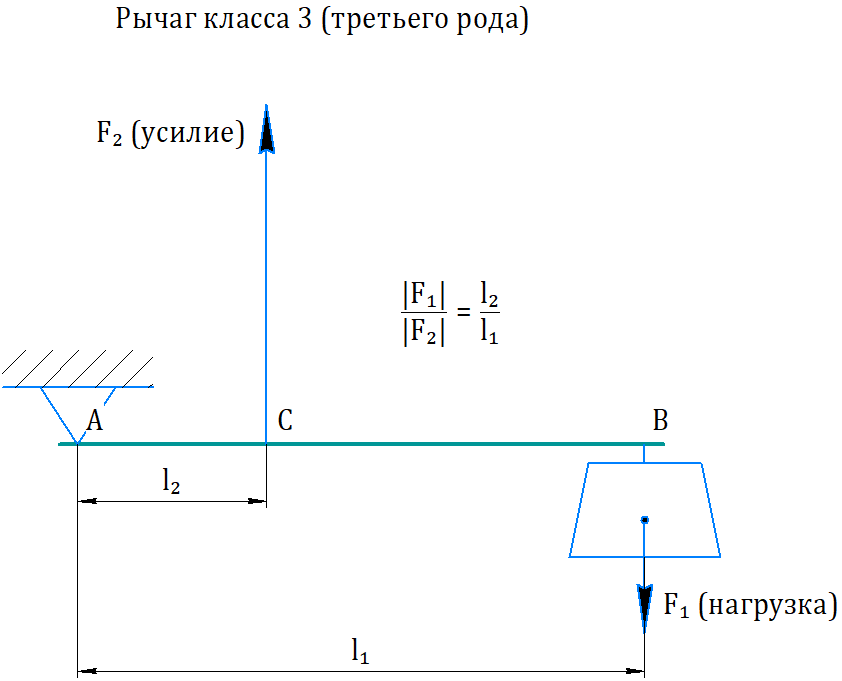
Рисунок 3. Рычаг класса 3
В принципе, 2-й и 3-й классы - по сути один и тот же рычаг, только нагрузка и усилие меняются в них местами, поэтому иногда их относят к одному и тому же второму роду.
Составной рычаг - состоит из нескольких рычагов, действующих последовательно: сопротивление одного рычага в системе рычагов действует как усилие для следующего, и таким образом приложенная сила передается от одного рычага к другому. Примеры составных рычагов включают в себя весы, кусачки для ногтей, клавиши пианино и другие (задняя дверь багажника или капот легковых автомобилей на гидравлических телескопических упорах, подъём кузова самосвала - гидроцилиндр в центре, движение мышцами рук и ног человека и животных).
Реализация моделей
Для реализации модели рычага любого класса в SimInTech механике используется один и тот же блок "Рычаг". Потому что с точки зрения моделирования, для трех точек балки рычага A, B и средней C (как показано на рисунках выше) нам необходимо задать их скорости перемещения. Модель рычага занимается вычислением трёх сил, и уравновешиванием трёх скоростей, возникающих в его точках. В зависимости от того, в какой точке вы разместите заделку, получится рычаг того или иного класса.
Вообще говоря, можно смоделировать этим же блоком и балку, не прикрепленную ни в какой точке к неподвижной опоре. Но тогда, нужно следить за относительным перемещением трех точек и помнить о допущении малого угла наклона балки рычага.
Рычаг класса 1
Создадим модель рычага, где нагрузкой будет вертикальный пружинный маятник с демпфером - рычагом будем поднимать его груз вверх, дополнительно сжимая пружину. Пружина нам потребуется чтобы система оставалась устойчивой как при отсутствии усилия, так и при его наличии. Усилие будем прикладывать с другой стороны вручную, дополнительно добавляя со стороны пользователя модели силу (в любой момент моделирования). На этой же стороне будет подвешен небольшой груз (например, это может быть учет массы самого рычага), но его массы будет недостаточно для создания нужной силы чтобы поднять нагрузку. Схема представлена на рисунке:
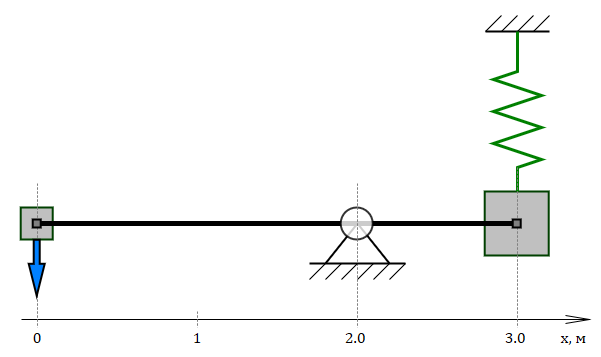
Рисунок 4. Механическая схема рычага 1 класса
Зададимся такими условиями для модели: масса нагрузки 2 кг, плечо 1 м, масса с противоположной стороны 0.5 кг (500 г) - это будет всегда действующим усилием. Плечо усилия равно 2 м. Силу, которую пользователь модели может приложить, установим эквивалентной 1.5 кг, то есть равной примерно 14.7 Н (зададим в блоке как 1.5*9.81). Параметры пружинного демпфера: коэффициент жесткости пружины 400 Н/м, коэффициент демпфирования 13 Н·с/м . С такими параметрами линейные перемещения точки приложения усилия не превысят 10 см без дополнительного усилия, и будут не более 30...40 см при дополнительно приложенном усилии. То есть, в допущение о малом угле наклона рычага мы практически укладываемся: 30 см составляют 10% от общей длины рычага 3 м.
Наберите расчетную схему аналогично рисунку:
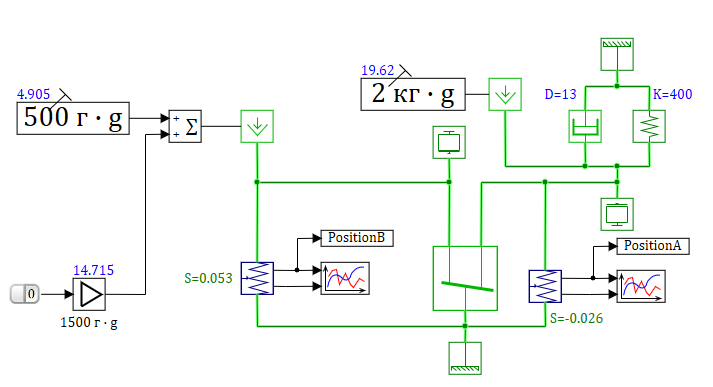
Рисунок 5. Пример рычага 1 класса
Все блоки вам должны быть уже известны, кроме блока рычага. Дадим только необходимые пояснения по приведенной расчетной схеме.
У нас есть две массы, инерции поступательного движения, которые в принципе могут перемещаться независимо друг от друга. Их мы присоединили к входным портам A и B рычага. Порт C рычага прикреплен к заделке, которая неподвижна и будет в эту точку рычага сообщать всегда 0 скорость, независимо от величины силы, которую будет необходимо для этого приложить. Обратите внимание, что к подвижным частям рычага мы не можем подсоединить просто силу - нулевую или ненулевую, мы обязаны задать именно инерционную массу, чтобы можно было вычислить динамику движения рычага. Без задания массы, пусть даже и с силовым воздействием - динамики у модели не будет (в этом случае возможно посчитать только статическую картину нагружения, но это задача не для SimInTech, который в первую очередь предназначен для динамических расчетов).
Масса нагрузки соединена через пружину и демпфер также со своей заделкой, на которой она "висит". И к этой массе приложена сила тяжести через блок "Механика - Идеальный источник силы поступательного движения". Здесь все как мы делали в предыдущих примерах.
Масса со стороны усилия - на неё действует только сила тяжести, всегда, и сила со стороны рычага. К этому же блоку мы еще дополнительно добавили через сумматор вторую силу, которую кнопкой пользователь может добавлять к силе тяжести.
Через блоки датчиков поступательного движения выведены графики положений и скоростей (по вертикали) концов рычага - точек приложения нагрузки и усилия, относительно неподвижной заделки. Определим, сколько в данной модели блоков, вычисляющих скорости движения: всего различных шин здесь 4 штуки, однако две из них порождены заделками (скорость равна 0), то есть всего только два объекта в схеме могут перемещаться. Направление перемещения мы выбрали вертикальное для обоих масс, и схема это предполагает как аксиому.
Приведем настройки блоков в виде скрншотов их свойств:
Рисунок 6. Свойства массы нагрузки
Рисунок 7. Свойства массы со стороны усилия
Рисунок 8. Свойства демпфера у нагрузки
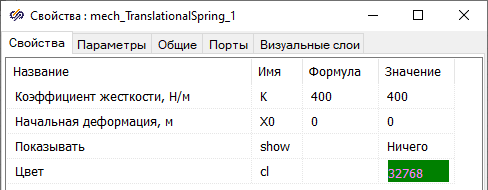
Рисунок 9. Свойства пружины у нагрузки
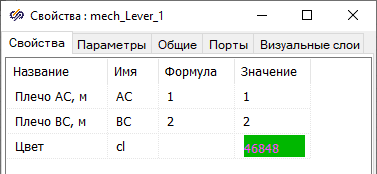
Рисунок 10. Свойства рычага
Моделирование и анализ результатов
Результат моделирования, с двумя нажатиями кнопки (кнопку, кстати, удобнее сделать без фиксации):

Рисунок 11. Результат моделирования рычага 1 класса - два приложения усилия, перемещение точки приложения усилия
Как видно из графика, у системы имеется два устойчивых положения, соответствующих ситуации без приложения усилия и ситуации с приложенным усилием. В демо-примерах приведен данный проект, с дополнительной анимацией, можете ознакомиться с ним и попробовать задавать другие свойства тех или иных элементов схемы.
Рычаг класса 2
Создадим модель рычага второго класса. Его механическая условная схема представлена на рисунке:
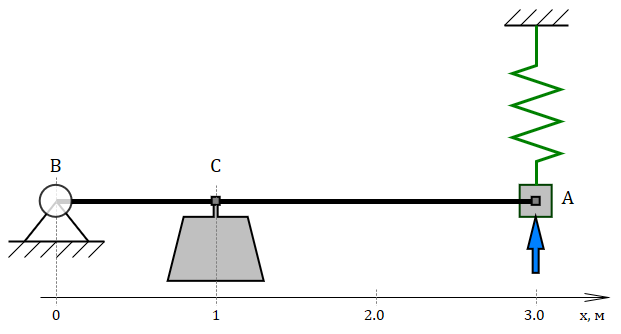
Рисунок 12. Механическая схема рычага 2 класса
Зададимся такими условиями для модели: масса нагрузки 3 кг, её плечо 1 м, масса со стороны усилия 0.5 кг (500 г) - это будет всегда действующим усилием (возможно, это часть массы рычага). Плечо усилия равно 3 м, но нам надо будет задать в блоке рычага 2 метра для расстояния AC. Силу, которую пользователь модели может приложить, установим эквивалентной 2.5 кг, то есть равной примерно 24.5 Н (зададим в блоке как -2.5*9.81). Параметры пружинного демпфера: коэффициент жесткости пружины 100 Н/м, коэффициент демпфирования 6 Н·с/м . С такими параметрами линейные перемещения точки приложения усилия не превысят 15-20 см как без дополнительного усилия, так и при дополнительно приложенном усилии. То есть, в допущение о малом угле наклона рычага мы укладываемся.
Расчетная схема такого рычага не сильно отличается от схемы для рычага 1 класса, и приведена на рисунке:
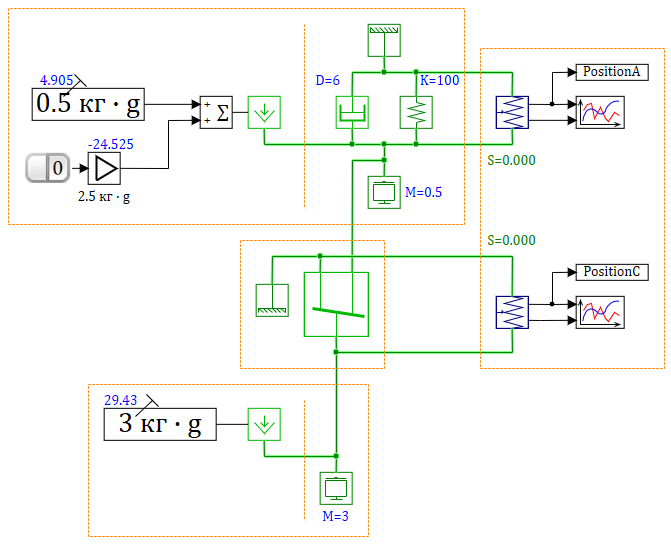
Рисунок 13. Пример рычага 2 класса
Отличие от первой схемы заключается в том, что заделка была перемещена с порта C на порт B рычага, нагрузка - повешена на порт C, а усилие - на порт A. Оранжевым пунктиром выделены смысловые части расчетной схемы: рычаг с его точкой опоры, нагрузка с силой тяжести, усилие с силой тяжести и пользовательской силой, а также демпфирующим пружинным подвесом точки приложения усилия. В отдельный блок выделены датчики и графики - хотя они являются частью расчетной схемы, однако влияния на динамику они не оказывают. Аналогичные смысловые части можно выделить и в первой схеме рычага класса 1.
Обратите внимание, что модель рычага не содержит никакой инерционной массы, или инерции вращения для самого рычага. Предполагается что они пренебрежимо малы по сравнению с усилием и нагрузкой. Если же вам требуется учесть инерцию тела рычага, тогда необходимо строить более сложную модель, либо учитывать массу рычага в составе инерционных блоков данной схемы.
Свойства, задаваемые для блоков данной схемы, очевидны. Обратите внимание что надо задавать 1 и 2 м для плеч рычага:
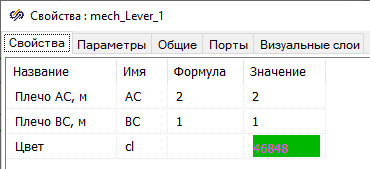
Рисунок 14. Пример длин для рычага 2 класса
Хотя относительно точки опоры усилие здесь имеет плечо 3 метра.
Результат расчета с однократным приложением усилия приведен на рисунке:
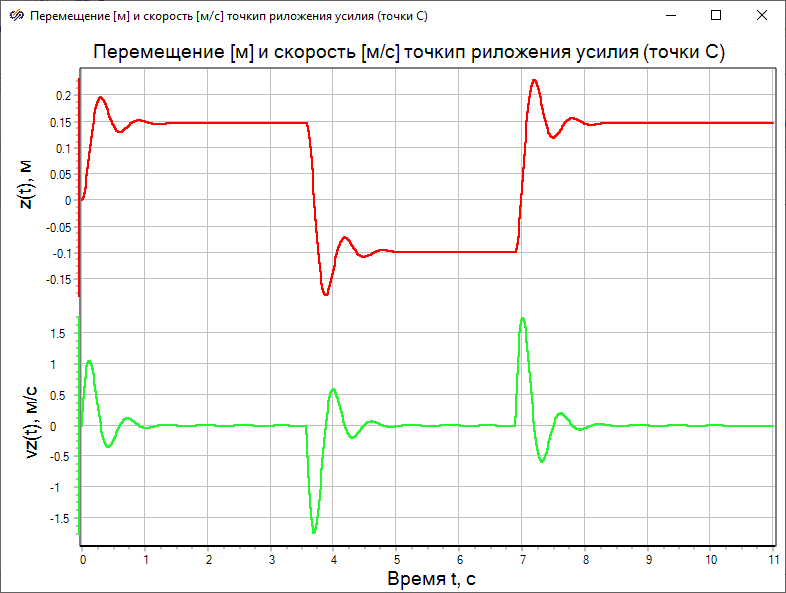
Рисунок 15. Результат расчета
Рычаг класса 3
Создадим модель рычага третьего класса. Его механическая условная схема представлена на рисунке:
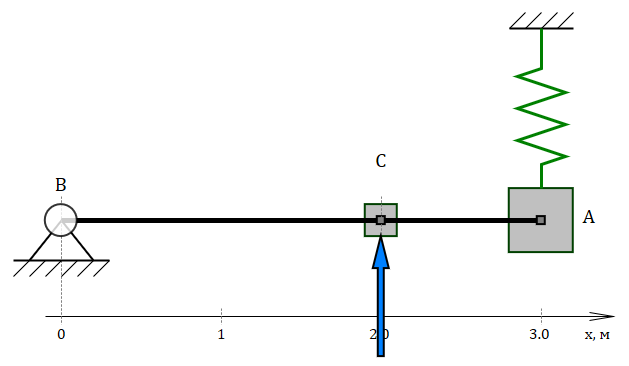
Рисунок 16. Механическая схема рычага 2 класса
Зададимся следующими данными для модели: масса нагрузки 2 кг, её плечо 3 м, масса со стороны усилия 0.5 кг (500 г) - это будет всегда действующим усилием (возможно, это масса самого рычага). Плечо усилия равно 2 м. Силу, которую пользователь модели может приложить, установим эквивалентной 7.5 кг, то есть равной примерно 73.6 Н (зададим в блоке как -7.5*9.81). Параметры пружинного демпфера: коэффициент жесткости пружины 100 Н/м, коэффициент демпфирования 6 Н·с/м . С такими параметрами линейные перемещения точки приложения усилия не превысят 30 см как без дополнительного усилия, так и при дополнительно приложенном усилии. То есть, в допущение о малом угле наклона рычага мы укладываемся.
Расчетная схема такого рычага приведена на рисунке:
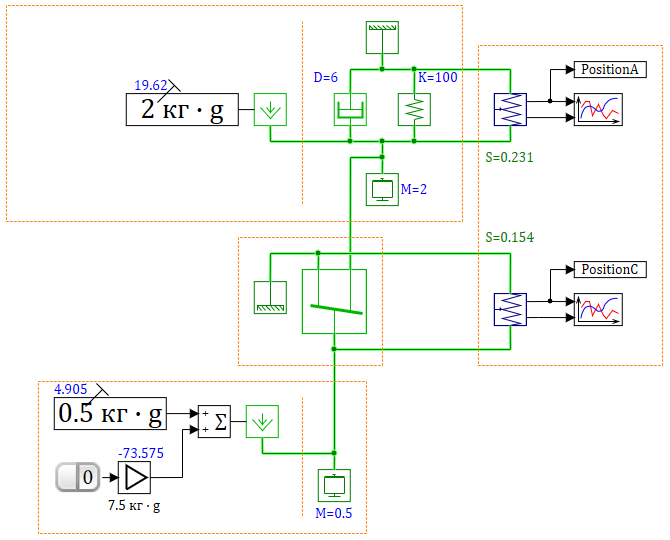
Рисунок 17. Механическая схема рычага 3 класса
Заделка так же как и во втором примере, находится на порте B рычага, к двум другим присоединена инерционная масса с силами тяжести, и к порту C добавлена еще внешняя сила, которую можно приложить со стороны пользователя модели. Пример расчета будет аналогичен предыдущим двум примерам.
Все представленные примеры также доступны к просмотру в папке демо-примеров среды SimInTech.
Данными примерами возможности блока рычага не ограничиваются - как вы можете видеть, за счет особенностей построения блока рычага в модели механики SimInTech (на входы его портов надо подавать скорости соответствующих точек, а рычаг пересчитает свою силовую реакцию), данный блок можно применять и тогда, когда нет жесткой неподвижной опоры ни в одной из его точек. Например, модель дачной тачки, которая катится по земле и имеет динамическую опору в виде неровной поверхности и колеса с амортизатором - такую модель можно сделать при помощи блока рычага. Подобный пример приведен в папке с демо-примерами.
