Постановка задачи
Рассмотрим систему, состоящую из двух пружинных маятников, в которой один маятник подвешен к неподвижной заделке (к потолку), а второй маятник подвешен к первому. При этом у каждого маятника может быть пружина со своей жесткостью и демпфированием, а также разная масса груза.
Механическая схема приведена на рисунке:
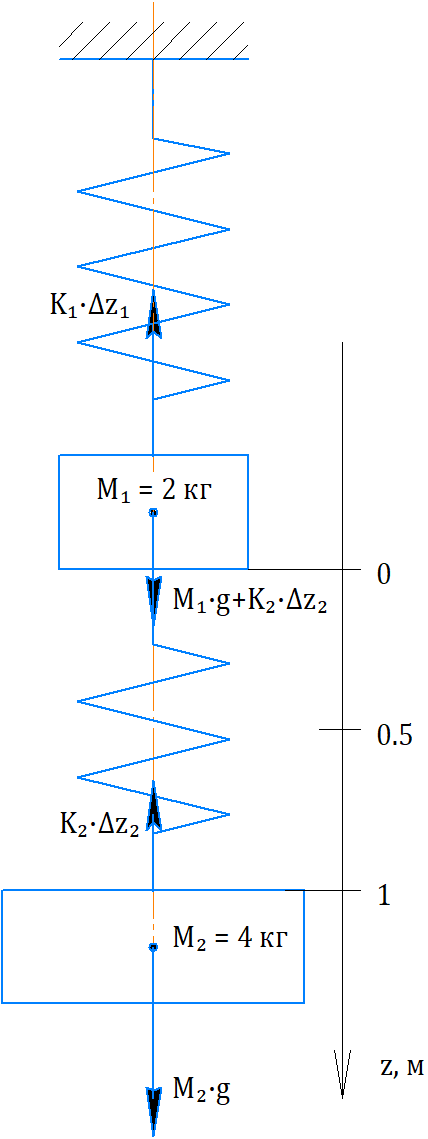
Рисунок 1. Схема двойного пружинного маятника
В такой постановке на первый маятник, в дополнении к силе растяжения (упругости) первой пружины и силы тяжести, будет воздействовать еще вторая сила - сила растяжения/сжатия второй пружины. Второй груз будет двигаться в принципе только под действием двух сил - своей силы тяжести и силы растяжения второй пружины. Однако сила растяжения второй пружины будет уже зависеть от двух координат т.к. она закреплена на подвижном первом теле.
Реализация модели
Примем следующие значения величин: массы грузов M₁ = 2 кг, M₂ = 4 кг, коэффициенты жесткости пружин: K₁ = 190 Н/м, K₂ = 70 Н/м; коэффициенты демпфирования: D₁ = 0.4 Н/(м/с), D₂ = 0.9 Н/(м/с). За точку отсчета по вертикальной оси примем нижний край первого груза, а верхний край второго груа в начальный момент времени будет находиться на расстоянии 1 м от точки отсчета. Пружины в начальный момент времени не деформированы, а грузы имеют нулевые начальне скорости. Сами пружины условно невесомы, их массами можно пренебречь.
Расчетная схема для такой системы приведена на следующем рисунке:
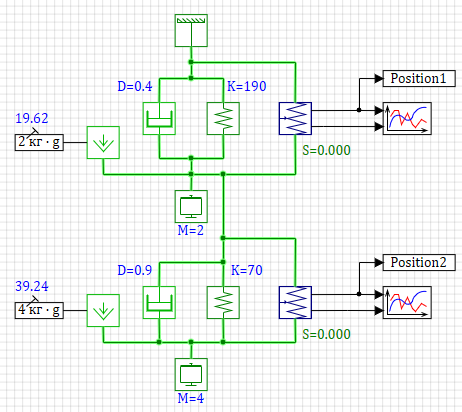
Рисунок 2. Расчетная схема двойного пружинного маятника
Легко видеть, что схема состоит из примерно двух одинаковых частей, из двух демпферов прямолинейного движения, только у нижней части вместо заделки есть соединение с инерционной массой верхнего демпфера, а у верхнего демпфера за счет этого добавилась еще одна сила, действующая на массу.
На этом примере преимущества библиотеки механики перед выписыванием дифференциальных уравнений динамики проявляются более явно. Вместо записи двух дифференциальных уравнений второго порядка с некоторыми общими членами в правых частях (сила упругости и демпфирования второй пружины, которую надо было бы записать в двух уравнениях с праильным знаком), мы просто соединили линией связи две системы. Однако, и здесь надо следить за соединениями систем и за направлением движения (или вращения). Если бы например, мы приложили бы вторую силу тяжести ошибочно со знаком минус, забыв что у нас ось направлена вниз, то получили бы систему где один груз притягивается к Земле, а второй отталкивается, и ответ был бы неверен.
Обратите внимание, что датчик перемещения второго груза на приведенном рисунке подсоединен к линиям связи, протянутым от первого груза и от второго груза. Таким образом, на датчик будут сообщены скорости обеих грузов, и он будет вычилясть относительную скорость второго груза (относительно первого) и такое же перемещение. Если вам требуется измерить абсолютную скорость тела и его координату, датчик следует подключать как у первого груза - одним концом к заделке.
Моделирование и анализ результатов
Тестовое моделирование даёт следующие результаты для координат и скоростей грузов (для второго груза - это относительные скорость и координата). У второго груза амплитуда колебаний выше, чем у первого из-за больше ймассы и меньшей жесткости пружины:
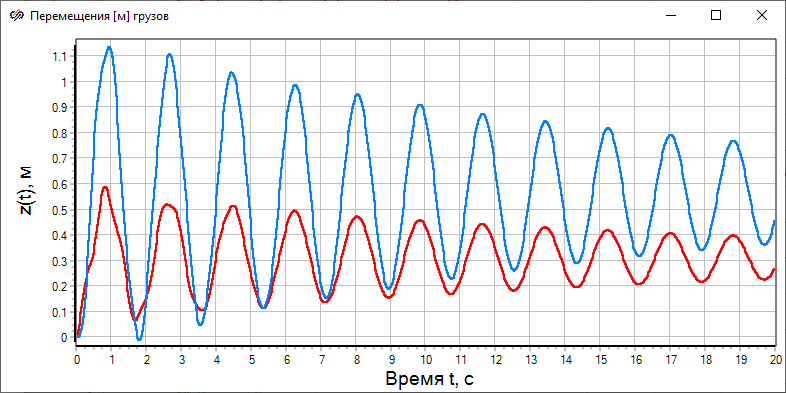
Рисунок 3. Координаты грузов
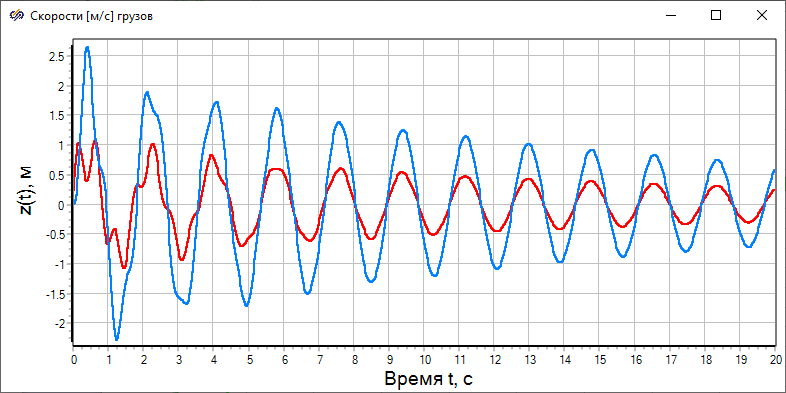
Рисунок 4. Скорости грузов
Видно, что через некоторое время система приходит к одному колебанию с общим периодом. При других сочетаниях масс, жесткостей пружин и коэффициентов демпфирования переходной процесс и графики могут получиться существенно другими. Например, если задать для первого груза в 10 раз большую массу (20 кг), тогда он будет определять основное движение системы, и амплитуда его колебаний сильно возрастет, а 4 кг подвешенный к нему второй груз уже не так сильно повлияет на первый маятник:
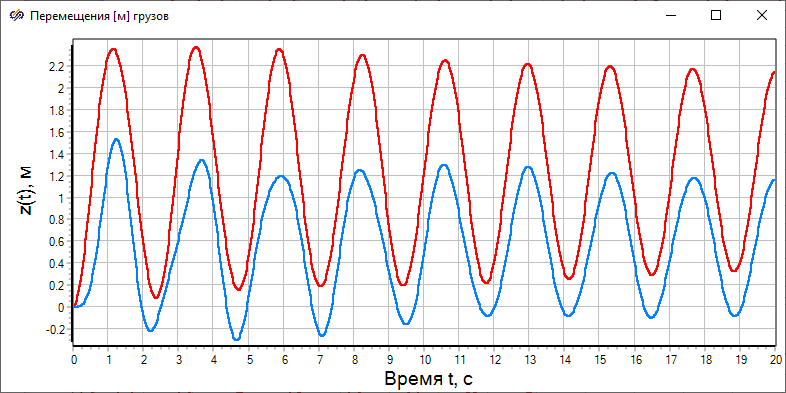
Рисунок 5. Координаты грузов при массе первого груза 20 кг
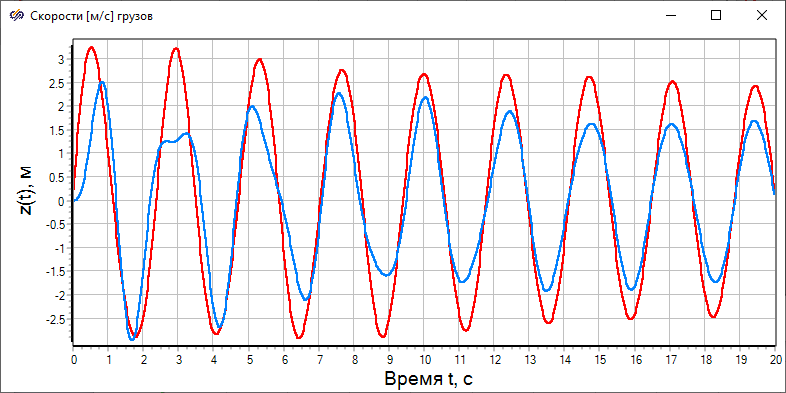
Рисунок 6. Скорости грузов при массе первого груза 20 кг
И за 20 секунд расчета система сделает уже 9 колебаний, а не 12 как в предыдущем моделировании.
По аналогии, можно построить систему и из 3-х тел, из 4-х и так далее.
