Постановка задачи
Рассмотрим теперь аналогичные примеры (как пружинный маятник и демпфер), только применительно к вращательному движению. Аналогом пружинного маятника и демпфера будет так называемый "крутильный маятник". Также его называют торсионный маятник или вращательный маятник.
Это простая механическая система, представляющая собой тело, подвешенное в поле тяжести на тонкой нити и обладающее лишь одной степенью свободы: вращением вокруг оси, задаваемой неподвижной нитью. Если при повороте тела в нити возникает момент силы, пропорциональный углу поворота, то тело будет вращаться по гармоническому закону. Вместо нити может быть у более жесткий вариант - трос, или даже стержень.
Крутильным маятником является баланс — деталь балансирного механизма механических часов, вращательные колебания которой определяют точность их хода.
Для нас важно, что в данной системе есть возможность только для одного движения - вращения массивного тела вокруг неподвижной в пространстве оси. При этом ось обладает упругими качествами - её момент сопротивления закручиванию пропорционален углу поворота тела вокруг оси.
Механическая схема приведена на рисунке:
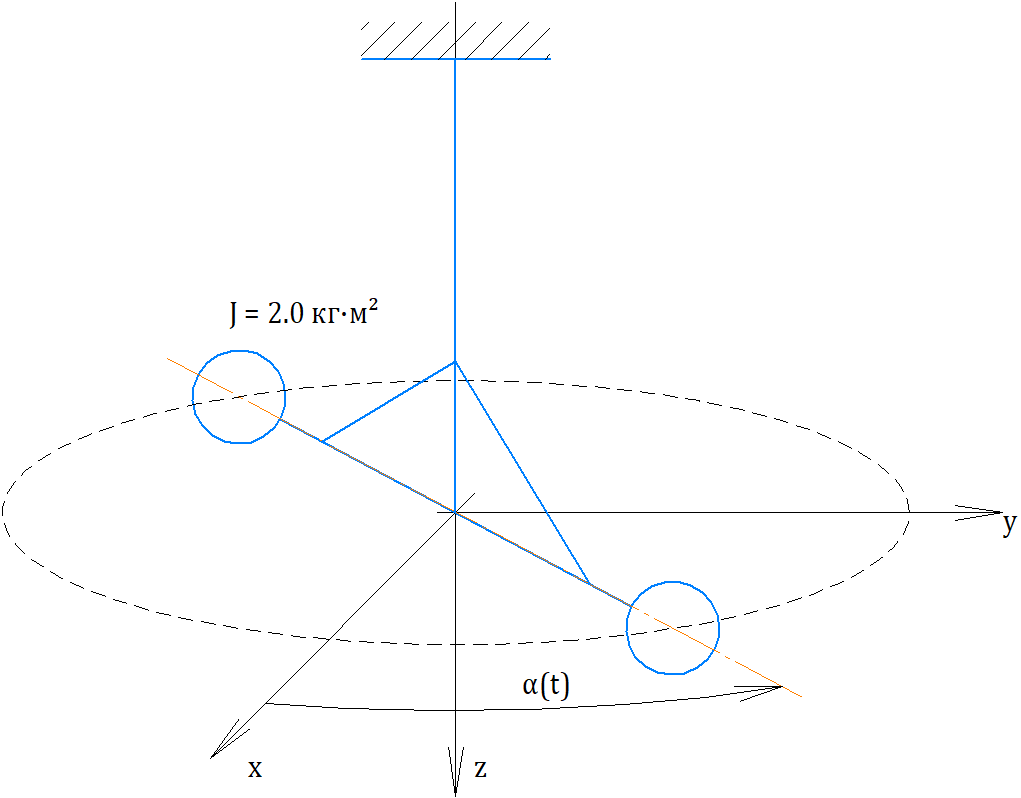
Рисунок 1. Крутильный маятник, на подвесе
Примем, что момент инерции системы равнен 4 кг·м², а жесткость пружины 17 Н·м/рад. Также примем аналогичные допущения, что никаких внешних воздействий на систему нет, а тросик идеально упругий - при его скручивании создается момент сопротивления, обратно пропорциональный углу поворота. Пластических деформаций в тросике нет, и отсутствуют также потери на трение и прочие потери в материале.
Реализация модели
Для реализации модели такого маятника, вам надо по аналогии с первым примером, найти в библиотеке механики следующие расчетные блоки: Инерция вращательного движения, Пружина вращательного движения, Заделка вращательного движения. Также, для вывода на график результатов моделирования, нам потребуется Идеальный датчик вращательного движения . Добавьте к нему еще временной график, для вывода угла поворота и угловой скорости. Несмотря на то, что крутильный маятник работает тоже в поле силы тяжести, как и пружинный, на вращательное движение эта сила никак не воздействует, поэтому дополнительного момента или еще какого-то блока, учитывающего силу тяжести, нам здесь не потребуется.
Соедините всё механическими линиями связи - от инерции вращательного движения к пружине, от заделки к пружине и потом порты датчика подключите к нужным шинам и к графику. Задайте момент инерции равным 4 кг·м², а жесткость пружины 17 Н·м/рад. Начальную скорость вращения задайте на уровне 0.2 рад/с. В итоге, у вас может получиться схема аналогичная рисунку:
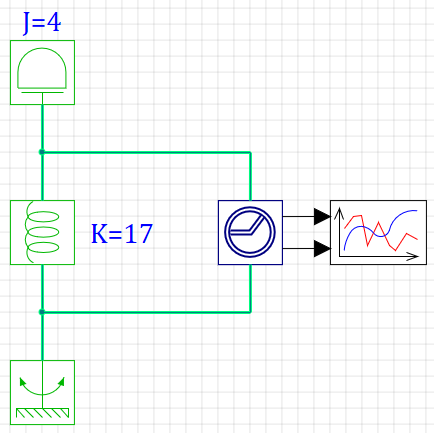
Рисунок 2. Расчетная схема крутильного маятника
Обратим еще раз внимание, что здесь нет внешней силы, которая могла бы маятник сдвинуть из состояния равновесия. Поэтому пока что мы задали начальную ненулевую скорость, чтоб в системе присутствовало какое-то начальное количество энергии (в данном случае кинетической). В пружинном маятнике движение было обусловлено тем что груз был подвешен на нерастянутой пружине в начальный момент времени, и обладал запасом потенциальноэ энергии, относительно точки равновесия.
Другим способом задать здесь неравновесность является возможность в пружине задать начальный угол скручивания. Если его поставить ненулевым, то пружина (которой мы моделируем подвес) начнет раскручиваться.
Моделирование и анализ результатов
В итоге, если запустить модель на расчет, мы получим незатухающие гармонические колебания:
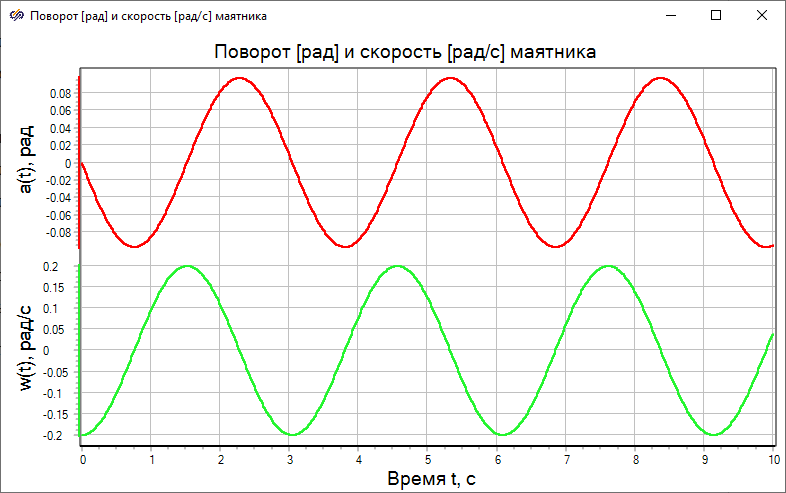
Рисунок 3. Результат расчета
Этот результат соответствует исходным предпосылкам в поставленной задаче - колебательный маятник без диссипации энергии.
О линиях связи для вращательного движения
Примененные в данной модели линии связи типа "Механика вращательная связь" внешне выглядят так же, как и "Механика поступательная связь", только выполнены немного другим зеленым цветом. По своей сути они передают сходные, но другие величины - в одну сторону передается угловая скорость вращения w, от блоков типа "инерция вращательного движения", а в другую сторону передаются моменты сил T, воздействующих на данное вращение (вращательный элемент схемы).
Таким образом, в моделях механики недопустимо подсоединять линии связи одного типа (поступательного) к линиям связи другого типа (вращательного), потому что по ним передаются разные сигналы, с разными именами и разным физическим смыслом.
С другой стороны, математически уравнения динамики поступательного движения пружинного маятника и вращательного движения крутильного маятника - математически это одно и то же уравнение, только в одном из них координатой выступает линейная величина z(t), а в другом угол поворота a(t). Силовым воздействием является сила F(t) и момент сил T(t). Инерционные члены уравнений: масса груза M и момент инерции крутильного маятника J. Поэтому, между математическим описанием вращательного движения и поступательного движения есть очень много общего. По сути это одно и то же типовое звено - колебательное звено - примененное к двум видам движения, с точностью до единиц измерения входящих в него величин. Но механически и геометрически, движения эти конечно разные.
