Осциллирующие массы
Описание демо-примера
Расположение
C:\SimInTech64\Demo\Автоматика и математика\Гибридные системы\Осциллирующие массы
Описание
Физическая система состоит из двух пружин, один конец каждой неподвижно закреплен. К свободным концам прикреплены грузы ненулевой массы. Система выводится из состояния равновесия путем смещения одного или двух грузов из нейтрального положения.
Система может находиться в одном из двух локальных состояний: "раздельно" и "вместе". В состоянии "раздельно" непрерывное поведение описывается системой уравнений с ограничением:
где m1, m2– массы грузов; k1, k2 – жесткости пружин; n1, n2– нейтральные координаты грузов; x1, x2– координаты грузов; ν1, ν2 – скорости грузов; s – совокупная жесткость пружин в состоянии "вместе". Состоянию "вместе" соответствует условие ограничения (x1=x2) и (ν1>ν2) и система уравнений:
В момент соударения происходит изменение правых частей уравнений движения (скорости и ускорения) грузов в соответствии с законом сохранения импульса. В этом состоянии массы удерживаются с экспоненциально убывающей жесткостью. И когда разность сил натяжения пружин превосходит жесткость, система переходит в состояние "раздельно".
Параметры системы:
Для тестирования была создана модель вышеописанной системы в среде моделирования SimInTech со следующими параметрами:
- Минимальный шаг – 10-6;
- Максимальный шаг – 0,1;
- Абсолютная ошибка – 10-4;
- Относительная ошибка – 10-4;
- Начальный шаг – 10-3;
- Время моделирования (t) – 20.
Результаты моделирования методами RK23, RK23ST, RKF78, RKF78ST и Адаптивный 1 продемонстрированы на рисунках 1-10. Данные графики демонстрируют результаты, полученные на всем времени моделирования и временном промежутке, находящимся в окрестности первого переключения модели в состояние "вместе". В таблице 1 указаны время первых четырех смен состояния, и сравнение с аналитическим решением данной задачи (см. документ "Аналитическое решение осциллирующих масс").
| Метод | Точность | 1-я смена состояния | 2-я смена состояния | 3-я смена состояния | 4-я смена состояния | ||||
| Время | ∆t | Время | ∆t | Время | ∆t | Время | ∆t | ||
| RK23 | 1e-6 | 1.7695 | 0 | 4.215 | -0.007 | 9.97 | 0.041 | 11.9 | -0.49 |
| RK23ST | 1.7695 | 0 | 4.223 | 0 | 9.963 | 0.033 | 11.903 | -0.044 | |
| RKF78 | 1.7719 | 0.024 | 4.205 | 0 | 9.967 | 0.029 | 11.807 | -0.142 | |
| RKF78ST | 1.7719 | 0.024 | 4.205 | 0 | 9.967 | 0.029 | 11.807 | -0.142 | |
| Адаптивный 1 | 1.7672 | -0.0026 | 4.064 | -0.158 | 9.977 | 0.047 | 11.805 | -0.144 | |
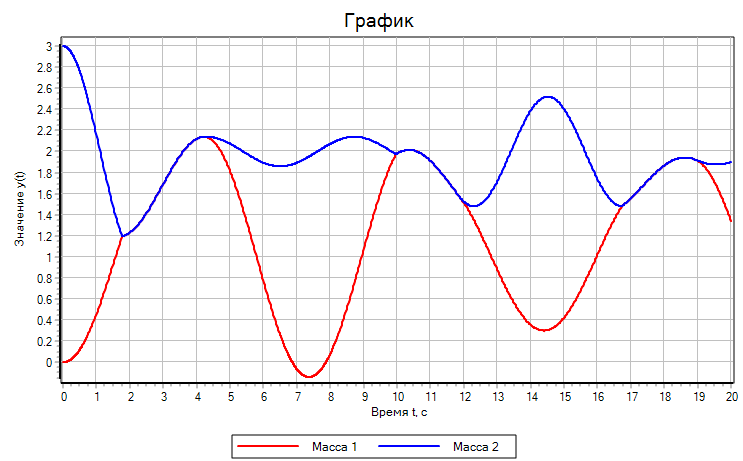
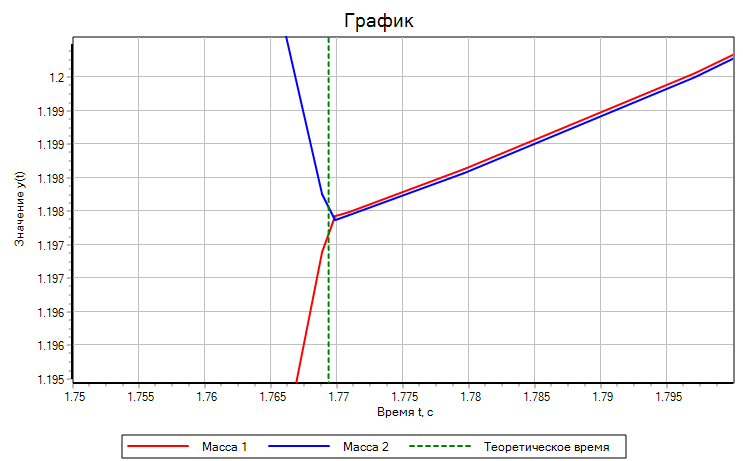
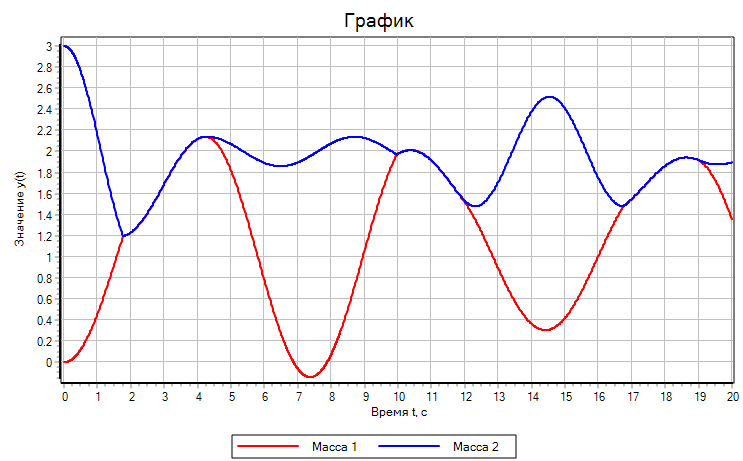
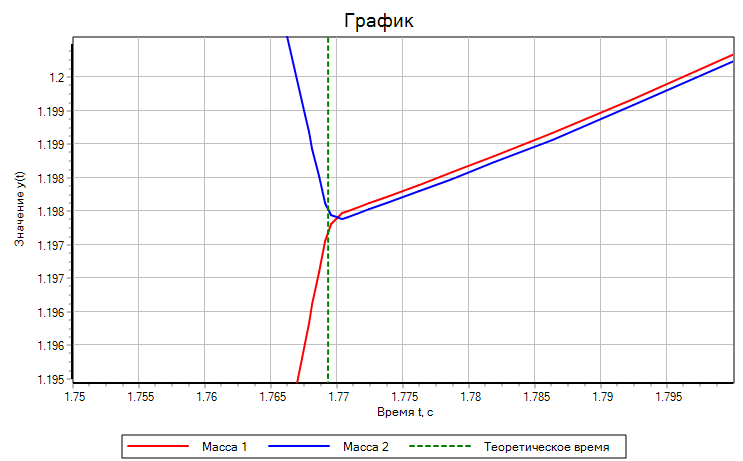
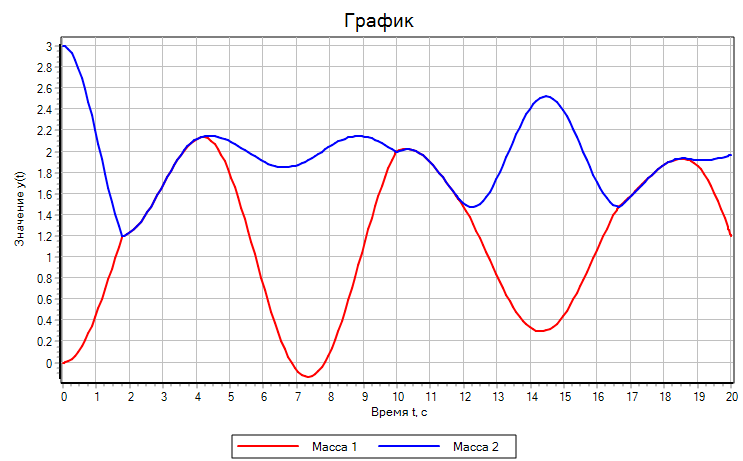
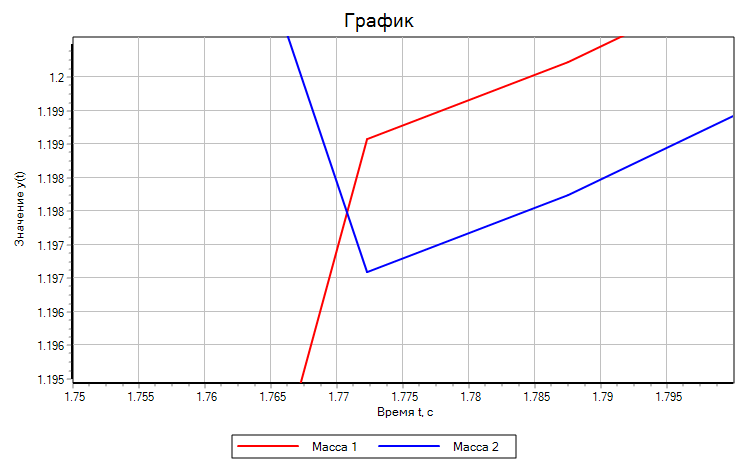
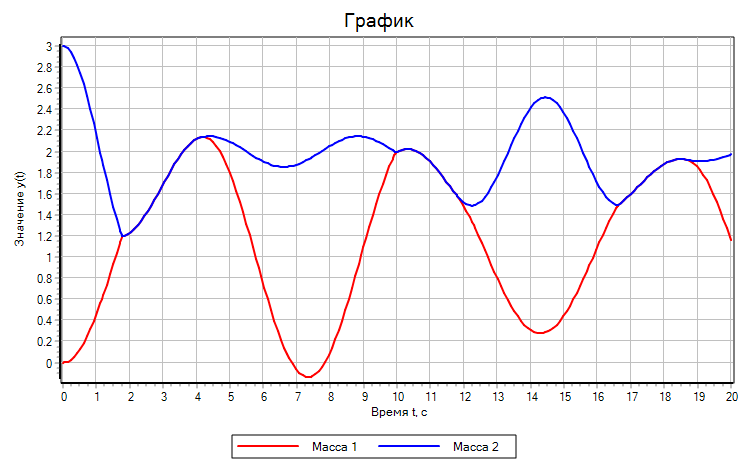
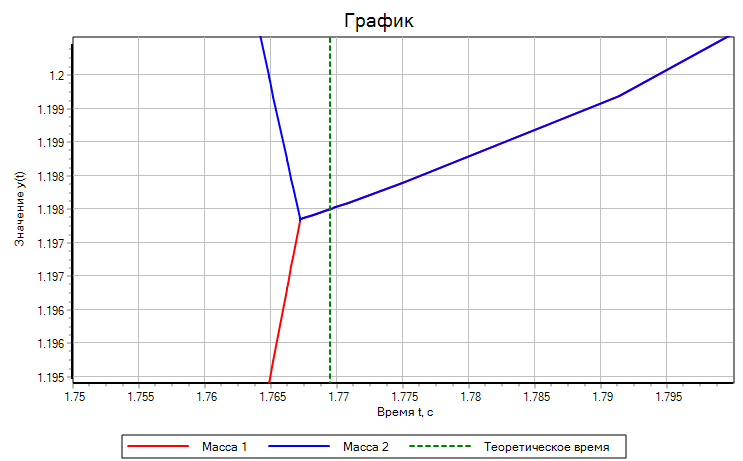
Несмотря на то, что результаты всех использованных методов схожи, но при рассмотрении момента первого переключения модели имеются различия. С учётом того, что теоретическое время момент переключения составляет 1,7695 с, то наиболее точным к теоретическому значению оказались методы RK23 и RK23ST, а наложение координат масс находится в пределах допустимой ошибки моделирования. Однако, метод Адаптивный 1 имеет меньшую ошибку наложения координат масс, но срабатывает значительно раньше теоретического времени (1,7695 с). Методы RKF78 и RKF78ST сработали позже и имеют наибольшую ошибку наложения координат масс, т.к. это связано с высоким порядком и меньшим шагом интегрирования на момент переключения.
Используемые блоки
Язык программирования, ступенька, временной график.