 |
 |
|
| в палитре | на схеме |
В блоке реализована модель относительного движения двух вращающихся тел, между которыми через
определенные угловые промежутки расположены пружинные фиксаторы той или иной физической
природы (механические, магнитные, электрические и т.д.). Тормозной момент в фиксаторах
задается двумя способами:
- Аналитически
- Таблично
Тормозная сила вычисляется аналитически. Вид графика тормозной силы представлен на
рисунке: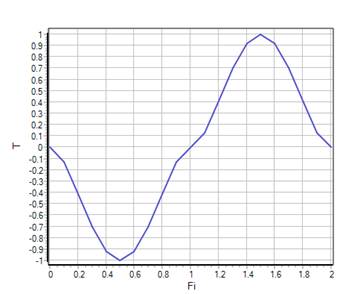 Во втором случае тормозной момент задается как табличная функция угла поворота. При этом
рекомендуется соблюдать зеркальную симметрию, т.е. T(φ)=-T(-φ),
чтобы предотвратить диссипацию энергии.
Во втором случае тормозной момент задается как табличная функция угла поворота. При этом
рекомендуется соблюдать зеркальную симметрию, т.е. T(φ)=-T(-φ),
чтобы предотвратить диссипацию энергии.
Рисунок 1. График тормозного момента
Угловые отметки, где стоят фиксаторы, могут задаваться двумя способами:
- Равномерно
- Таблично
В первом случае задается число фиксаторов N, положения фиксаторов определяются по формуле:
Во втором случае координаты угловых отметок задаются напрямую в табличном виде. Необходимо отслеживать, чтобы разность двух соседних координат была больше 2d.
В модели блока также учитывается трение. Уравнения модели имеют следующий вид:


Порты
Блок имеет два механических порта (R и C) вращательного движения.
Свойства
- Mode - способ задания тормозного момента;
- Fmax - максимальный тормозной момент, Н·м;
- D - ширина зоны торможения, град;
- Fx - массив координат зоны торможения, град;
- Ty - массив тормозного момента, Н·м;
- Reg - способ задания координат фиксаторов;
- N - число фиксаторов на отрезке [0,360] град;
- B - коэффициент трения подшипников, Н·м·с/рад;
- Coord - координаты центров [-180..180], град;
- Fi0 - начальный угол, рад.
Параметры
- W - относительная угловая скорость, рад/с;
- T - тормозной момент, Н/м;
- Fi - положение, рад.
