 |
 |
|
| в палитре | на схеме |
В модели блока реализована модель соединения двух тел вращения (M1 и M2), связанных между собой абсолютно жестким телом (соединителем) постоянной длины L. Соединитель шарнирно крепится к телу вращения M1 на расстоянии R1 от оси вращения этого тела, а также к телу вращения M2 на расстоянии R2 от оси вращения этого тела. Соединитель считается безынерционным. Условная схема соединения приведена на рисунке ниже.
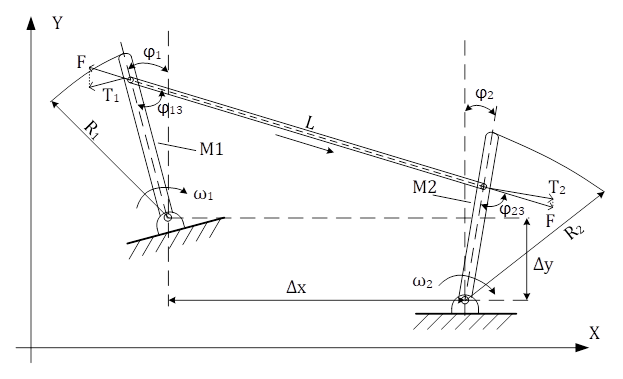










L - длина соединителя;
∆x - расстояние по X между осями М1 и М2;
∆y - расстояние по Y между осями М1 и М2;
T1 - момент в шарнире 1, действующий на тело М1;
R1 - расстояние шарнира 1 от оси вращения тела М1;
ω1 - угловая скорость тела М1;
φ1 - угол поворота тела М1;
φ13 - угол между телом М1 и соединителем;
T2 - момент в шарнире 2, действующий на тело М2;
R2 - расстояние шарнира 2 от оси вращения тела М2;
ω2 - угловая скорость тела М2;
φ2 - угол поворота тела М2;
φ23 - угол между телом М2 и соединителем;
Кω - коэффициент связи между угловыми скоростями тел М1 и М2;
G(F) - нелинейная функция;
F - сила, действующая вдоль оси соединителя.
Порты
Блок имеет два механических ненаправленных порта вращательного движения, через которые на вход блока поступают угловые скорости, а на выход - моменты, действующие на тела вращения M1 и M2. Выходные порты блока отсутствуют.
Свойства
Параметры тела вращения М1:
- R1 - радиус шарнира, м;
- Fi1 - начальный угол, рад.
- R2 - радиус шарнира, м;
- Fi2 - начальный угол, рад.
- dX - расстояние по X между осями М1 и М2, м;
- dY - расстояние по Y между осями М1 и М2, м;
- L - длина соединителя, м.
Параметры
- _W1 - угловая скорость тела вращения М1, рад/с
- _Fi1 - угол поворота тела вращения М1, рад;
- _T1 - момент в шарнире, действующий на тело вращения М1, Н·м;
- _W2 - угловая скорость тела вращения М2, рад/с;
- _Fi2 - угол поворота тела вращения М2, рад;
- _T2 - момент в шарнире, действующий на тело вращения М2, Н·м.
