 |
 |
|
| в палитре | на схеме |
В блоке реализована модель идеальных датчиков угловой скорости и угла поворота (без учета демпфирования, инерции и других эффектов). Уравнения модели имеют следующий вид:
ω(t) = ωR(t) - ωC(t),
dφ(t)/dt = ω(t), φ(0) = φ0,
где: ωR(t) - угловая скорость порта R; ωC(t) - угловая скорость порта C; ω(t) - измеряемая разность угловых скоростей; φ(t) - измеряемая разность углов поворота портов R и C; φ0 - начальное значение угла поворота.
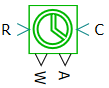
Порты
Блок имеет два механических порта вращательного движения – C и R. Постулируется, что положительное направление – от порта R к порту C. Также блок имеет два математических выходных порта, на которые поступают измеряемые значения ω(t) и φ(t).
Свойства
- Fi0 - начальное значение угла поворота, рад.
Параметры
- Fi - разность углов поворота, рад;
- W - разность угловых скоростей, рад/с.
