 |
 |
|
| в палитре | на схеме |
В блоке реализована модель вращательного движения тела с несбалансированным моментом инерции, зависящим от угла вращения.
Возможны три способа задания момента инерции:
- круговое движение (биение);
- эллиптическое движение (биение);
- таблично заданный момент инерции.
Уравнения модели блока имеют следующий вид:
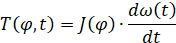
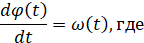
T(φ,t) - момент; ω(t) - относительная угловая скорость; φ(t) - угол поворота; J(φ) - момент инерции, зависящий от текущего угла поворота.
Для кругового и эллиптического движения тела вокруг собственной оси момент инерции относительно главной оси вычисляется по формуле:

Для кругового движения r рассчитывается по формуле:

Схема кругового движения представлена на рисунке 1: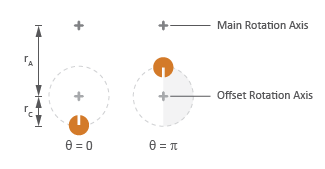 Для эллиптического движения расстояние до главной оси рассчитывается по следующей
формуле:
Для эллиптического движения расстояние до главной оси рассчитывается по следующей
формуле: где rII – радиус эллиптического движения на линии,
параллельной расстоянию между осями; rI - радиус эллиптического движения на
линии, перпендикулярной расстоянию между осями. Схема эллиптического движения приведена на
рисунке 2:
где rII – радиус эллиптического движения на линии,
параллельной расстоянию между осями; rI - радиус эллиптического движения на
линии, перпендикулярной расстоянию между осями. Схема эллиптического движения приведена на
рисунке 2:
Рисунок 1. Схема кругового движения
Рисунок 2. Схема эллиптического движения
Порты
Блок имеет один механический порт вращательного движения.
Свойства
- what - cпособ задания момента инерции (круговое биение/эллиптическое биение/таблично-заданный момент инерции);
- W0 - начальная угловая скорость, рад/с;
- F0 - начальный угол, рад.
- J0 - момент инерции относительно собственной оси, кг·м²;
- M - масса, кг;
- Ra - расстояние между осями вращения, м;
- Rc - радиус вращения, м.
- J0 - момент инерции относительно собственной оси, кг·м²;
- M - масса, кг;
- Ra - расстояние между осями вращения, м;
- R1 - радиус вращения, параллельный расстоянию между осями, м;
- R2 - радиус вращения, перпендикулярный расстоянию между осями, м.
- Fx - массив углов поворота, рад. Пример: [0; Pi; 1.5*Pi];
- Jy - массив моментов инерции, соответствующих углам поворота. Пример: [1,10,1].
Параметры
- Т - суммарный момент, Н·м;
- W - угловая скорость, рад/с;
- Fi - угол, рад;
- Q - мощность, Вт.
