 |
 |
|
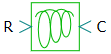
| в палитре | на схеме |
В блоке реализована модель нелинейной пружины вращательного движения. При этом момент пружины задается как функция угла деформации пружины одним из следующих способов:
- в виде полинома 5-ой степени;
- в виде таблично заданной функции;
Для полиноминальной зависимости выбирается один из следующих типов параметризации:
- симметричная;
- несимметричная;
В случае симметричной параметризации уравнения модели имеют следующий вид:

где T(t) - вычисляемый момент пружины; φ(t) - угол деформации пружины;
b1, b2, b3, b4,
b5 – коэффициенты полинома. В случае несимметричной параметризации
уравнения модели принимают следующий вид: где: b1p,
b2p, b3p, b4p,
b5p – коэффициенты полинома для φ(t)≥0;
b1n, b2n, b3n,
b4n, b5n - коэффициенты полинома для
φ(t)<0.
где: b1p,
b2p, b3p, b4p,
b5p – коэффициенты полинома для φ(t)≥0;
b1n, b2n, b3n,
b4n, b5n - коэффициенты полинома для
φ(t)<0.
Порты
Блок имеет два механических порта (R и C) вращательного движения.
Свойства
- par_type - тип параметризации (полином/таблично-заданная функция); при выборе типа параметризации полином используются свойства sym_type, а также B или Bp, Bn; при выборе табличной параметризации используются свойства Fx и Ty;
- sym_type - симметрия (симметрично/несимметрично);
- B - вектор коэффициентов жесткости, Н·м/рад;
- Bp - вектор коэффициентов жесткости для Fi, Н·м/рад;
- Bn - вектор коэффициентов жесткости для Fi, Н·м/рад;
- Fx - вектор деформации, рад (размерность должна совпадать с размерностью Ty);
- Ty - вектор моментов пружины, Н·м (размерность должна совпадать с размерностью вектора Fx);
- Fi0 - начальная деформация, рад.
Параметры
- T - момент, Н·м;
- W - разность угловых скоростей, рад/с;
- Fi - деформация, рад.
