 |
 |
|
| в палитре | на схеме |
В блоке реализована математическая модель трения между двумя контактирующими телами, которые
двигаются поступательно. Предполагается, что сила трения зависит от относительной скорости и
является суммой следующий составляющих: 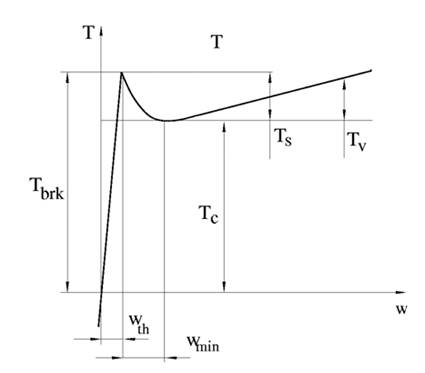 Математическая модель блока описывается следующей системой уравнений:
Математическая модель блока описывается следующей системой уравнений:
- силы страгивания (трение Штрибека и кулоновское трение);
- силы вязкого трения.
Рисунок 1. Схема действующих сил
Если



Порты
Блок имеет два механических порта поступательного движения – C и R. Постулируется, что момент трения положителен, если vC(t) > vR(t).
Свойства
- Fbrk - сила трения страгивания, H;
- Fc - сила кулоновского (сухого) трения, H;
- D - коэффициент вязкого трения, Н/(м/с);
- Cv - коэффициент затухания, м/с;
- Vth - пороговая скорость, м/с.
Параметры
- F - сила, Н;
- V - относительная скорость, м/с;
- Q - мощность, Вт.
