 |
||
| в палитре | на схеме |
Блок моделирует нагрузку от запирающего элемента на приводе крана, зависящую от угла поворота запирающего элемента.
Свойства
| Наименование свойства | Единицы | Обозначение |
|---|---|---|
| Начальный угол поворота запирающего элемента | градус | fi_ball_0 |
| Вектор значений угла поворота запирающего элемента | градус | fi_ball_vec |
| Вектор значений противодействующего момента | Н⋅м | M_ball_vec |
| Кинематический коэффициент передачи | м/градус | k_transf_v |
| Силовой коэффициент передачи | Н/(Н⋅м) | k_transf_f |
Свойства «Вектор значений угла поворота запирающего элемента» и «Вектор значений противодействующего момента» определяют зависимость нагрузки (противодействующего момента) от запирающего элемента на приводе крана от угла поворота запирающего элемента.
Свойство «Кинематический коэффициент передачи» определяет, какое приращение перемещения (в метрах) привода крана соответствует повороту запирающего элемента на 1 градус.
Свойство «Силовой коэффициент передачи» определяет, какая сила (в Ньютонах) на приводе крана соответствует моменту в 1 Н⋅м на запирающем элементе.
Параметры
| Наименование параметра | Единицы | Обозначение |
|---|---|---|
| Угол поворота запирающего элемента | градус | _fi_ball |
| Противодействующее усилие | Н | _F_ball |
| Противодействующий момент | Н⋅м | _M_ball |
Входные/выходные порты и связь с другими блоками библиотеки
Блок имеет один входной порт «R» типа «Механика поступательная связь», предназначенный для соединения с блоками типа ГПС - Механический элемент поступательного движения библиотеки Гидравлические и пневматические системы, а также с блоками библиотеки mehanika.dita.
Примеры соединения блока с блоками библиотек Гидравлические и пневматические системы и mehanika.dita приведены на рисунке (Рисунок 1).
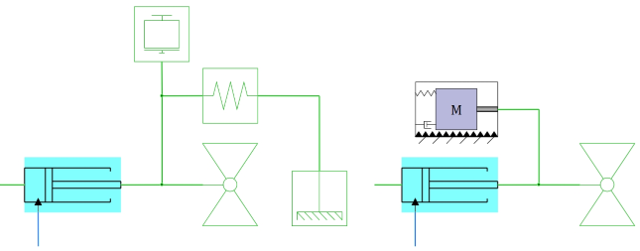
Рисунок 1. Примеры соединения блока с блоками библиотек «Автоматика» и «ГПС»
Математическая модель
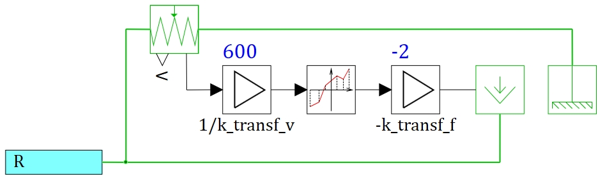
Рисунок 2. Внутренняя структура блока
Зависимость противодействующего момента от угла поворота запирающего элемента является кусочно-линейной. Интерполяция осуществляется блоком 0120.dita библиотеки «Автоматика». Учет кинематического и силового коэффициентов передачи осуществляется с помощью блоков 0040.dita библиотеки «Автоматика».
Для учета того, что нагрузка на приводе крана является силой, направленной противоположно направлению положительного перемещения привода, значение силы, полученное на выходе блока 0120.dita, кроме умножения на силовой коэффициент передачи, умножается на минус единицу.