 |
||
| в палитре | на схеме |
Блок предназначен для упрощенного моделирования динамики перемещения подвижных элементов гидро- и пневмоустройств. С помощью блока могут быть смоделированы приводы запорной и распределительной арматуры, запорно-регулирующие элементы клапанов, распределителей, регулируемых дросселей.
Переброс подвижного элемента из одного крайнего положения в другое осуществляется по управляющему сигналу (логической команде): 1 – перебросить, 0 – вернуть в исходную позицию.
Блок работает в соответствии с графиками, представленными на рисунке (Рисунок 1).
На рисунке обозначены:
ctrl – управляющий сигнал;
x – перемещение подвижного элемента;
t – время;
xmax – максимальное перемещение подвижного элемента;
t0-max – время переброса от нулевого до максимального перемещения;
tmax-0 – время переброса от максимального до нулевого перемещения;
tzon – задержка подачи сигнала;
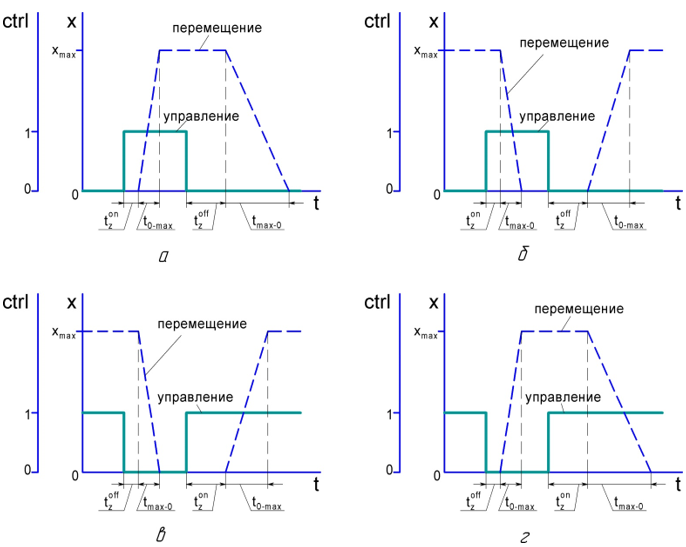
Рисунок 1. Логика работы блока
а – при отсутствии управляющего сигнала подвижный элемент находится в нулевом положении;
б – при отсутствии управляющего сигнала подвижный элемент находится в максимальном положении;
в – при отсутствии управляющего сигнала подвижный элемент находится в нулевом положении, в начальный момент времени подвижный элемент находится во взведенном состоянии*;
г – при отсутствии управляющего сигнала подвижный элемент находится в максимальном положении, в начальный момент времени подвижный элемент находится во взведенном состоянии*.
*Под взведенным состоянием понимается то, что до момента, соответствующего началу моделирования, был подан управляющий сигнал, ко-торый перевел подвижный элемент в заданное начальное положение (которое не соответствует положению при отсутствии управляющего сигнала).
Свойства
| Наименование свойства | Единицы | Обозначение |
|---|---|---|
| Начальное положение | – | i_0 |
| Положение при отсутствии сигнала | – | i_off |
| Максимальное перемещение | м | x_max |
| Время переброса от нулевого до максимального перемещения | с | t_zero_max |
| Время переброса от максимального до нулевого перемещения | с | t_max_zero |
| Задержка подачи сигнала | с | t_z_on |
| Задержка снятия сигнала | с | t_z_off |
Параметры
| Наименование параметра | Единицы | Обозначение |
|---|---|---|
| Перемещение | м | _x |
| Управляющий сигнал | _ctrl |
Входные/выходные порты и связь с другими блоками библиотеки
Блок имеет один входной порт «ctrl» и один выходной порт «transf» типа «Математическая связь».
Порт «ctrl» предназначен для подключения к источнику управляющего сигнала. Таким источником могут быть, например, блоки 0002.dita, 0136.dita, 0104.dita библиотеки avtomatika.dita.
Порт «transf» предназначен для соединения с блоками 3906.dita, 3907.dita, 3903.dita библиотеки DIR_gidro_pnevmo_sistemy.dita ГПС.
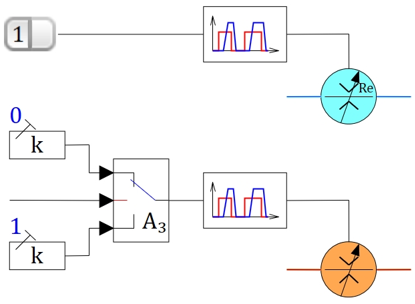
Рисунок 2. Примеры соединения блока с блоками библиотек «Автоматика» и «ГПС»
Математическая модель
Математическая модель блока состоит из следующих уравнений:



где
x – перемещение подвижного элемента;
t – время;
V – скорость перемещения подвижного элемента;
k1, k2 – коэффициенты;
V0-max – скорость подвижного элемента при перебросе от нулевого до максимального перемещения;
Vmax-0 – скорость подвижного элемента при перебросе от максимального до нулевого перемещения;
ioff – коэффициент, характеризующий положение подвижного элемента при отсутствии управляющего сигнала (0 – нулевое перемещение, 1 – максимальное перемещение);
ctrl – управляющий сигнал (1 – перебросить подвижный элемент, 0 – вернуть подвижный элемент в исходную позицию);
i0 – коэффициент, характеризующий положение подвижного элемента в начальный момент времени (0 – нулевое перемещение, 1 – максимальное перемещение);
tzon – задержка подачи сигнала; y – функция, реализуемая блоком «Задержка по включению и выключению» библиотеки «Автоматика»;
tzoff – задержка снятия сигнала;
xmax – максимальное перемещение подвижного элемента;
t0-max – время переброса подвижного элемента от нулевого до максимального перемещения;
tmax-0 – время переброса подвижного элемента от максимального до нулевого перемещения.
