 |
 |
|
| в палитре | на схеме |
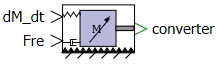
Блок моделирует механический элемент переменной массы поступательного движения, на который действуют сила инерции, позиционная сила, сила вязкого трения, сила сухого трения и реактивная сила.
Позиционная сила линейно зависит от перемещения элемента. При нулевом перемещении элемента позиционная сила может иметь как нулевое, так и ненулевое значение.
Сила вязкого трения линейно зависит от скорости элемента.
Сила сухого трения разделена на силу трения при страгивании и силу трения при движении, каждая из которых является постоянной величиной.
Свойства
| Наименование свойства | Единицы | Обозначение |
| Начальная масса механического элемента | кг | M_el_0 |
| Минимальная масса механического элемента | кг | M_el_min |
| Усилие от позиционной нагрузки (от действия упругих элементов) при нулевом перемещении механического элемента | Н | Fupr_0 |
| Эквивалентная жесткость упругих элементов | Н/м | c_upr |
| Начальное перемещение механического элемента | м | X_0 |
| Начальная скорость механического элемента | м/с | V_0 |
| Минимально возможное перемещение механического элемента | м | X_min |
| Максимально возможное перемещение механического элемента | м | X_max |
| Коэффициент вязкого трения | Н/(м/с) | Kv_tr |
| Сила сухого трения движения | Н | Ftr_dvizh |
| Сила сухого трения страгивания | Н | Ftr_str |
Параметры
| Наименование параметра | Единицы | Обозначение |
|---|---|---|
| Перемещение механического элемента | м | _X |
| Скорость перемещения механического элемента | м/с | _V |
| Ускорение механического элемента | м/с2 | _A |
Входные/выходные порты и связь с другими блоками библиотеки
Блок имеет один выходной порт «converter» типа «Механика поступательная связь» и два входных порта «dM_dt», «Fre» типа «Математическая связь».
Порт «converter» предназначен для соединения с блоками ГПС - Гидромеханический преобразователь поступательного типа, ГПС - Пневмомеханический преобразователь поступательного типа библиотеки ГПС, а также с блоками библиотеки mehanika.dita.
Порт «dM_dt» предназначен для соединения с блоком ГПС - Датчик расхода жидкости библиотеки «ГПС» или с блоками библиотеки avtomatika.dita, определяющими скорость изменения массы механического элемента.
Порт «Fre» предназначен для соединения с блоками библиотеки «Автоматика», определяющими реактивную силу, действующую на механический элемент.
Математическая модель
Математическая модель блока состоит из следующих уравнений:
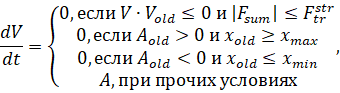



где
V – скорость перемещения механического элемента;
t – время;
Vold – скорость перемещения механического элемента на предыдущем шаге интегрирования;
Fsum – суммарная сила, которой при покое механического элемента противодействует сила сухого трения;
Ftrstr – сила сухого трения при страгивании;
Aold – ускорение механического элемента на предыдущем шаге интегрирования;
xold – перемещение механического элемента на предыдущем шаге интегрирования;
xmax – максимально возможное перемещение механического элемента;
xmin – минимально возможное перемещение механического элемента;
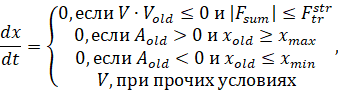
A – ускорение механического элемента;
Fdvizh – суммарная движущая сила, определяемая, как сумма внешних сил;
Fupr0 – позиционная нагрузка (суммарная сила от действия упругих элементов) при нулевом перемещении механического элемента;
cupr – эквивалентная жесткость упругих элементов;
x – перемещение механического элемента;
M – масса механического элемента;
Fre – реактивная сила, действующая на механический элемент;
Ktrv – коэффициент вязкого трения;
Ftrdvizh – сила сухого трения при движении;
sign – сигнум-функция, определяющая знак скорости перемещения механического элемента;
Fi – i-ая из n внешних движущих сил;
VM – скорость изменения массы механического элемента.
