 |
 |
|
| в палитре | на схеме |
Блок позволяет сделать каналы регулирования тока по осям d и q независимыми друг от друга с помощью формирования сигналов перекрестной компенсации. Значение напряжений компенсации может вычисляться в абсолютных или относительных единицах.
Входы
- Wr – скорость ротора (ωR [1/c])
- Iq - ток статора по оси q (ISq [А] или [отн. ед.])
- Id - ток статора по оси d (ISd [А] или [отн. ед.])
Выходы
- qk - напряжение компенсации по оси q (UqK [В] или [отн. ед.])
- dk - напряжение компенсации по оси d (UdK [В] или [отн. ед.])
Свойства
- Индуктивность статора по оси q (LSq [Гн])
- Индуктивность статора по оси d (LSd [Гн])
- Число пар полюсов двигателя (Zp)
- Потокосцепление ротора (Ψf [Вб])
- Нормирующее значение тока (Inorm [А])
- Нормирующее значение напряжения (Unorm [В])
Описание структуры модели
Выходные сигналы блока вычисляются по формулам:
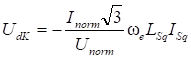
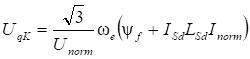
- Если задать
 то напряжения компенсации будут вычисляться в абсолютных единицах [B]
то напряжения компенсации будут вычисляться в абсолютных единицах [B]
Прим.: Более подробная информация дана в материалах:
