 |
 |
|
| в палитре | на схеме |
Модель используется совместно с элементами библиотек ЭЦ - Динамика (ЭЦД) 2.0 и Механика.
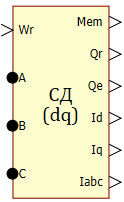
Входы
- Wr – скорость ротора (ωR [1/c]) - математическая связь
- A - входное напряжение фазы А (UA [В]) - электрическая связь
- B - входное напряжение фазы B (UB [В]) - электрическая связь
- C - входное напряжение фазы C (UC [В]) - электрическая связь
Выходы
- Mem - электромагнитный момент двигателя (Mem [Нм])
- Qr - угловое положение ротора (θR [рад])
- Qe - электрический угол поля (θe [рад])
- Id - ток статора по оси d в ориентированной по потоку ротора системе координат (ISd [А])
- Iq - ток статора по оси q в ориентированной по потоку ротора системе координат (ISq [А])
- Iabc - токи фаз А, В и С (IA, IB, IC [А])
Свойства
- Число пар полюсов двигателя (Zp)
- Сопротивление фазы статора (RS [Ом])
- Индуктивность статора по оси q (LSq [Гн])
- Индуктивность статора по оси d (LSd [Гн])
- Потокосцепление ротора (Ψf [Вб])
- Нач. электр. угол ротора - начальный электрический угол ротора относительно положительной оси фазы А (θ0 [рад])
Описание структуры модели
Модель двигателя построена во вращающейся системе координат dq, ось d которой ориентирована по потоку ротора.
Поведение двигателя описывается системой уравнений:
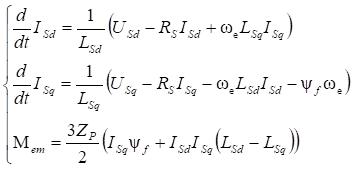
Где:
Usq и USd - проекции вектора напряжения статора на оси d и q
ωe - угловая скорость поля статора
Сопряжение входных трехфазных сигналов напряжения (A, B, C) со структурой соответствующей вышеприведенной системе уравнений осуществляется с помощью встроенных в модель преобразователей координат.
Выходной сигнал электромагнитного момента двигателя (Mem) следует подавать на модель механической части электропривода, использующей элементы раздела Механика. Модель механической части должна преобразовывать сигнал электромагнитного момента в значение угловой скорости ротора (Wr), подаваемое на соответствующий вход модели двигателя.
- Более подробная информация дана в материалах:
- Примеры подключения модели можно найти: SimInTech/Demo/Электроприводы
