 |
 |
|
| в палитре | на схеме |
Блок реализует преобразование сигнала рассогласования управляемой величины на входе регулятора в сигнал управляющего воздействия на его выходе.
Входы (математические связи)
- e – вход регулятора (на него подается сигнал рассогласования регулируемой величины).Щт
- Lim – вход ограничения (на него подается величина, ограничивающая модуль выходного сигнала).
- On– вход внешнего разрешения работы регулятора.
Выходы (математические связи)
- ВЫХ – выход регулятора (UВЫХ);
- pi – двухканальный контрольный выход на который выдаются пропорциональная и интегральная составляющие управляющего воздействия.
Свойства
- Внешнее ограничение –
- Да – ограничение выходного сигнала задается через вход Lim;
- Нет – ограничение выходного сигнала задается в свойствах объекта;
- Внешнее разрешение –
-
Да – работа регулятора разрешается при наличии логического единичного сигнала на входе On. При наличии на этом входе логического нуля выход регулятора сбрасывается в 0.
-
Нет – работа регулятора разрешена всегда
-
- Ограничение макс. – верхний уровень ограничения выходного сигнала;
- Ограничение мин. – нижний уровень ограничения выходного сигнала;
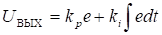
- Коэфф. пропорциональный – коэффициент пропорциональной составляющей (kp);
- Коэфф. интегральный – коэффициент интегральной составляющей (ki).
Описание структуры модели
Сигнал на выходе регулятора (без учета ограничения) вычисляется по следующей формуле:
Прим.:
- Для оптимальной работы регулятора в нем реализован алгоритм ограничения интегральной составляющей в зависимости от значения пропорциональной
- При выборе в свойствах объекта значения Внешнее ограничение – Нет, на изображении регулятора исчезает вход Lim
- При выборе в свойствах объекта значения Внешнее разрешение – Нет, на изображении регулятора исчезает вход On
- Задавая способ ограничения выходного сигнала, можно строить двухполярные и однополярные регуляторы в абсолютных или относительных единицах, с внешним или внутренним ограничением
- Контрольный выход (pi) удобно использовать для настройки коэффициентов регулятора
