 |
 |
|
| в палитре | на схеме |
Блок реализует преобразование вектора из неподвижной трехфазной системы АВС во вращающуюся систему координат dq.
Входы
- ABC - проекции вектора на оси A, B и C;
- SinQ – синус угла между неподвижной осью фазы А и вращающейся осью d;
- CosQ – косинус угла между неподвижной осью фазы А и вращающейся осью d.
Выходы
- d – величина проекции вектора на ось d;
- q - величина проекции вектора на ось q.
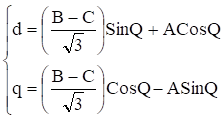
Описание структуры модели
Значения выходных величин вычисляются следующим образом:
Прим.: Более подробную информацию см. в материалах:
