 |
 |
|
| в палитре | на схеме |
Модель используется совместно с элементами библиотек ЭЦ - Динамика (ЭЦД) 2.0 и Механика.
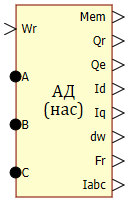
Входы
- Wr – скорость ротора (ωR [1/c]) - математическая связь
- A - входное напряжение фазы А (UA [В]) - электрическая связь
- B - входное напряжение фазы B (UB [В]) - электрическая связь
- C - входное напряжение фазы C (UC [В]) - электрическая связь
Выходы
- Mem - электромагнитный момент двигателя (Mem [Нм])
- Fr - модуль потока ротора (ΨR [Вб])
- Iabc - токи фаз А, В и С (IA, IB, IC [А])
Свойства
- Загрузить Lm = f(Fm) из файла - имя файла
зависимости.
Файл должен располагаться в директории проекта и быть сохранен с расширением *.dat.
Внутренняя структура файла должна иметь следующий вид:где:Fm = [ [ 0, Ψm1, Ψm2, Ψm3, Ψm4, Ψm5, Ψm6, Ψm7, Ψm8, Ψm9], [Lm1, Lm1, Lm2, Lm3, Lm4, Lm5, Lm6, Lm7, Lm8, Lm9] ];- Ψmi - потокосцепление намагничивания ([Гн])
- Lmi - соответствующее значение индуктивности намагничивания ([Гн])
Файл может быть сформирован по известной характеристике намагничивания с использованием формулы:
Рекомендуемое количество точек аппроксимации функции Lm = f(Fm) находится в диапазоне от 5 до 20.
Пример заполненного файла:Fm = [ [ 0, 0.43790, 0.56328, 0.68847, 0.81315, 0.93774, 1.06086, 1.18122, 1.29673, 1.29673], [0.01684, 0.01684, 0.01735, 0.01750, 0.01693, 0.01645, 0.014971333, 0.01311, 0.00975, 0.00750] ]; - Зависимость Lm = f(Fm) - зависимость статической индуктивности намагничивания от потокосцепления намагничивания ([Гн]). Заполняется автоматически при загрузке файла, указанного в свойстве "Загрузить Lm = f(Fm) из файла "
- Сопротивление статора (RS [Ом])
- Сопротивление ротора (RR [Ом])
- Индуктивность рассеяния ротора (LσR [Гн])
- Индуктивность рассеяния статора (LσS [Гн])
- Число пар полюсов двигателя (Zp)
Описание структуры модели
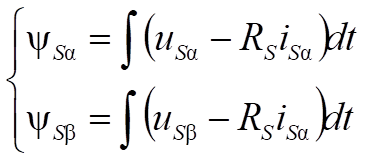
- В модели статора вычисляется поток статора в системе (ось ориентирована по оси фазы
А) с помощью интегрирования:
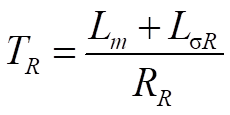
- В модели ротора вычисляется величина потокосцепления ротора в системе (ось d
ориентирована по потоку ротора):

где:
Затем осуществляется переход dq => αβ (ΨRd, ΨRq = 0 => ΨRα, ΨRβ)
- По известным потоку и току статора в системе αβ вычисляется потокосцепление
намагничивания:

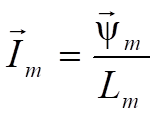
- По характеристике, заданной в файле Lm = f(Fm),
функциональным преобразователем (ФП) определяется текущее значение индуктивности
намагничивания Lm и находится соответствующий ток
намагничивания:
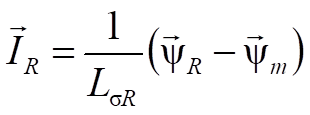
- По потоку намагничивания и потоку ротора вычисляется ток ротора:

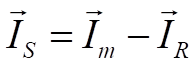
- Определяется ток статора: Блок "Задержка на шаг интегрирования" обеспечивает развязку логической петли. При этом вычисленное в текущем цикле расчёта значение тока статора будет использоваться на следующем цикле.
- Электрический угол необходимый для координатных преобразований модели вычисляется с
помощью выражения:

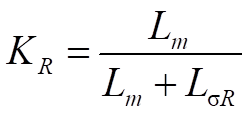
- Электромагнитный момент двигателя вычисляется с помощью формулы:
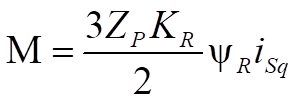
где:
Координатные преобразования осуществляются соответствующими преобразователями координат (АВС<=>αβ<=>dq)
Прим.:
- Вывод уравнений модели подробно рассмотрен в материалах:
- Примеры подключения модели можно найти: SimInTech/Demo/Электроприводы
