 |
 |
|
| в палитре | на схеме |
Блок реализует модель нелинейного ограничителя перенапряжений. Используется совместно c элементами библиотеки ЭЦ - Динамика (ЭЦД) 2.0.
Модель основана на нелинейном сопротивлении и RLC-элементах. В блоке реализовано три варианта
схемы замещения ограничителя перенапряжения (ОПН) по выбору. Варианты схем представлены на
рисунке (Рисунок 1). 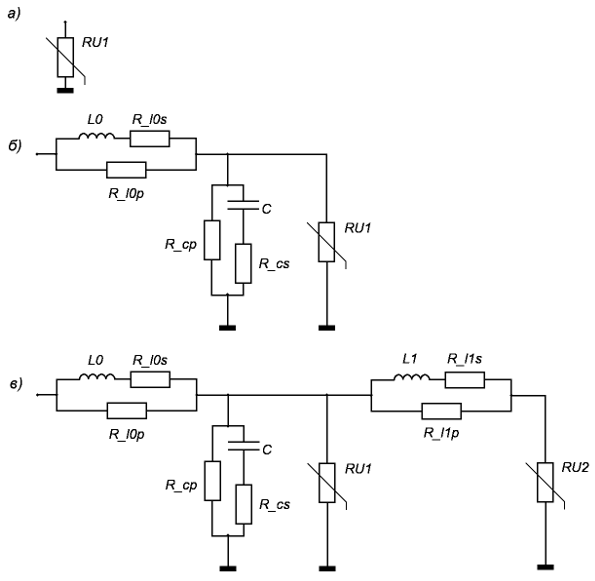 Вольт-амперная характеристика (ВАХ) нелинейного элемента задается выражением:
Вольт-амперная характеристика (ВАХ) нелинейного элемента задается выражением: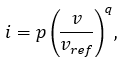 где
p – коэффициент, q – показатель степени, vref –
нормирующее напряжение, В. Свойства p и q задаются либо одним числом, либо
массивами с одинаковым числом элементов, моделируя несколько зон ВАХ ОПН.
где
p – коэффициент, q – показатель степени, vref –
нормирующее напряжение, В. Свойства p и q задаются либо одним числом, либо
массивами с одинаковым числом элементов, моделируя несколько зон ВАХ ОПН.
Рисунок 1. Варианты схемы замещения ОПН: а) – одиночная безынерционная; б) – одиночная инерционная; в) – IEEE
Для обеспечения устойчивости расчета при больших значениях тока (задается пользователем) ВАХ элемента сводится к линейной.
За положительное направление тока принято направление к порту 1.
Порты
- 1 – порт электрической связи.
Свойства
- Вид схемы замещения;
- Индуктивность L0, Гн;
- Индуктивность L1, Гн;
- Ёмкость С, Ф;
- Сопротивление R_L0p, Ом;
- Сопротивление R_L1p, Ом.
- Массив коэффициентов p;
- Массив показателей степени q;
- Нормирующее напряжение, В;
- Ток начала линейности ВАХ, А.
Параметры варистора RU2:
- Массив коэффициентов p;
- Массив показателей степени q;
- Нормирующее напряжение, В;
- Ток начала линейности ВАХ, А.
- Имя на схеме;
- Сопротивление R_L0s, Ом;
- Сопротивление R_Cs, Ом;
- Сопротивление R_Cp, Ом;
- Сопротивление R_L1s, Ом.
Параметры
- Ток, А.
