 |
 |
|
| в палитре | на схеме |
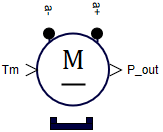
Блок реализует модель двигателя постоянного тока с постоянными магнитами. Используется в цепях c элементами библиотеки ЭЦ - Динамика (ЭЦД) 2.0.
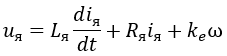
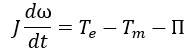
Модель двигателя постоянного тока с постоянными магнитами (PMDC) описывается следующими уравнениями:


Входные порты
- a+ – порт электрической связи;
- a- – порт электрической связи;
- Tm – порт математической связи задания момента сопротивления в Н·м.
Выходные порты
- P_out – порт математической связи для получения параметров двигателя.
Свойства:
- Тип;
- Номинальная мощность на валу, Вт;
- Номинальное напряжение обмотки якоря, В;
- Номинальная частота вращения, об/мин;
- Момент инерции, кг·м^2;
- Механические потери [T0, B], [Н·м, Н·м·с];
- Параметры обмотки якоря [Lя, Rя], [Гн, Ом];
- Коэффициент момента, Н·м/А;
- Коэффициент ЭДС, В/с;
- Начальная угловая скорость [ω0], [1/с].
- Номинальный момент, Н·м.
Параметры
- Ток, А;
- Скорость вращения, об/мин.
