 |
 |
| Векторизован | |
| в палитре | на схеме |
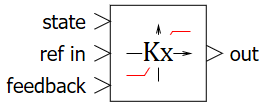
Блок реализует математическую модель дискретного регулятора с обратной связью по состоянию.
Регулятор используется для управления линейными системами в контурах управления, оснащенных звеном обратной связи.
Блок представляет собой субмодель, структурная схема которого в составе системы управления с
обратной связью представлена на рисунке (Рисунок 1):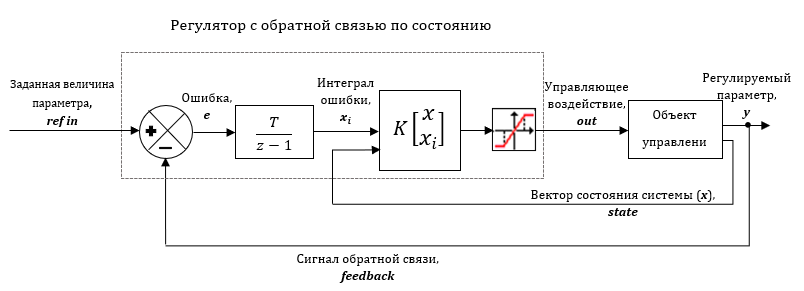
Рисунок 1. Структурная схема системы управления с регулятором с обратной связью по состоянию.
Выходной сигнал блока определяется следующим соотношением:
 где K – матрица обратной связи регулятора, xe
– расширенный вектор состояния системы, равный:
где K – матрица обратной связи регулятора, xe
– расширенный вектор состояния системы, равный:
 где x – вектор состояния системы, xi – интеграл сигнала ошибки.
где x – вектор состояния системы, xi – интеграл сигнала ошибки.
Интеграл ошибки, xi, является дополнительным состоянием, которое обеспечивает нулевую установившуюся ошибку для системы с замкнутым контуром.
Входные порты
- state – измеренный или оцененный вектор состояния системы;
- ref in – задающее воздействие;
- feedback – сигнал обратной связи.
Выходные порты
- out – управляющее воздействие.
Свойства
- Матрица коэффициентов усиления – заданная матрица обратной связи регулятора;
- Минимальное значение – минимальное значение выхода;
- Максимальное значение – максимальное значение выхода;
- Период квантования – период квантования расчета блока.
Параметры
Нет
