 |
 |
| Векторизован | |
| в палитре | на схеме |
Блок реализует математическую модель предиктора Смита.
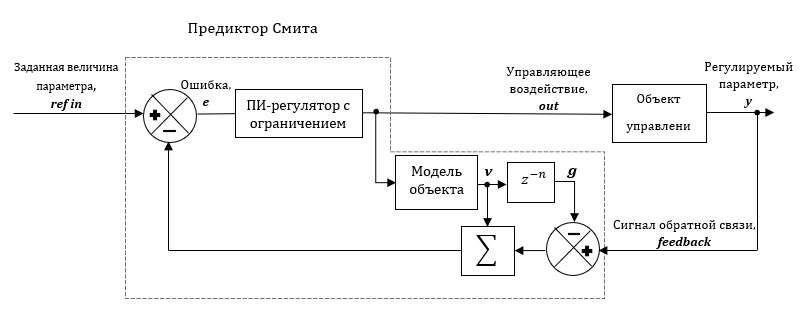
Рисунок 1. Структурная схема системы управления с обратной связью и предиктором Смита.
Выходной сигнал ПИ-регулятора (порт out блока) применяется к объекту управления и к внутренней модели регулятора. ПИ-регулятор в первую очередь управляет моделью, а не объектом управления, через сумматор. Сигнал g должен совпадать с измеряемым сигналом регулируемой переменной y. Сигналы y и g сравниваются для получения сигнала ошибки, который включает в себя ошибки как от помех, так и от модели. Они добавляются к сигналу v от модели объекта для подачи сигнала обратной связи в блок ПИ-регулятора.
Передаточная функция системы имеет вид:

где WО, WПИ(z), WМО(z) – передаточные функции объекта управления, ПИ-регулятора и модели объекта соответственно.
Входные порты
- ref in – задающее воздействие;
- feedback – сигнал обратной связи.
Выходные порты
- out – управляющее воздействие.
Свойства
- ПИ-регулятор с ограничением
- Пропорциональная составляющая – значение коэффициента усиления П-составляющей;
- Интегральная составляющая – значение коэффициента усиления И-составляющей;
- Период квантования – период квантования расчета блока;
- Линейное с насыщением
- Минимальное значение – минимальное значение выхода;
- Максимальное значение – максимальное значение выхода;
- Передаточная функция модели объекта
- Коэффициенты числителя – вектор b, размерностью [mb];
- Коэффициенты знаменателя – вектор a, размерностью [ma];
- Начальные условия – вектор начальных значений выходной величины блока при t = 0;
- Степень запаздывания на период квантования – значение степени запаздывания n.
Параметры
Нет
