 |
 |
| Векторизован | Си | |
| в палитре | на схеме |
Блок реализует математическую модель регуляторов, состоящих из одного звена: П–, И–, Д– регуляторы, двух звеньев: ПИ–, ПД– регуляторы или трех звеньев: ПИД-регулятор, в зависимости от заданных свойств.
Блок реализует передаточную функцию ПИД-регулятора следующего вида:
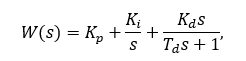 где Kp , Ki , Kd – коэффициенты усиления
пропорциональной, интегрирующей и дифференцирующей составляющих регулятора соответственно,
Td – постоянная времени дифференцирования.
где Kp , Ki , Kd – коэффициенты усиления
пропорциональной, интегрирующей и дифференцирующей составляющих регулятора соответственно,
Td – постоянная времени дифференцирования.
ПИД-регулятором называется устройство, применяемое в контурах управления, оснащенных звеном
обратной связи (Рисунок 1). 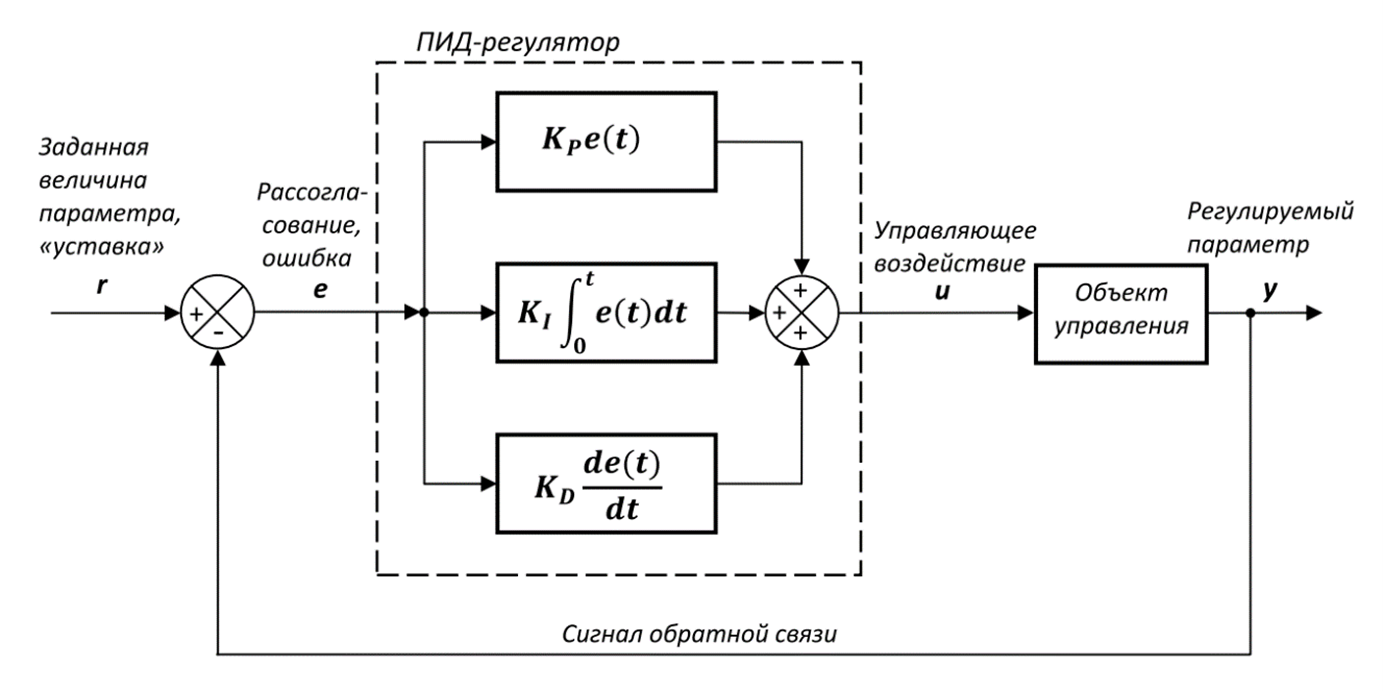
Рисунок 1. Структурная схема системы управления с обратной связью с ПИД-регулятором.
Выходной сигнал ПИД-регулятора определяется тремя слагаемыми: первое слагаемое пропорционально
величине сигнала рассогласования (ошибки), второе — интегралу сигнала рассогласования, третье —
его производной:

Если какой-то из трех компонентов не используется, то регулятор будет пропорциональным, интегрирующим, дифференцирующим, или пропорционально-дифференцирующим, или пропорционально-интегрирующим, соответственно используемым компонентам.
Входы
- in – сигнал ошибки.
Выходы
- out – управляющее воздействие.
Свойства:
- Тип регулятора – режим работы регулятора может принимать
следующие значения:
- «P» – пропорциональный регулятор;
- «I» – интегрирующий регулятор;
- «D» – дифференцирующий регулятор;
- «PI» – пропорционально-интегрирующий регулятор;
- «PD» – пропорционально-дифференцирующий;
- «PID» – пропорционально-интегрально-дифференцирующий регулятор.
- Начальные условия – вектор начальных значений yi(0) выходной величины блока.
- Пропорциональная составляющая – Kp – значение коэффициента усиления П-составляющей, появляется в режимах работы «P», «PI», «PD», «PID».
- Интегральная составляющая – Ki – значение коэффициента усиления И-составляющей, появляется в режимах работы «I», «PI», «PID».
- Дифференциальная составляющая – Kd – значение коэффициента усиления Д-составляющей, появляется в режимах работы «D», «PD», «PID».
- Постоянная времени дифференцирования, сек – Td – появляется в режимах работы «D», «PD», «PID».
