 |
 |
| Векториован | |
| в палитре | на схеме |
Блок реализует описание многомерной линейной динамической системы в матричной форме:
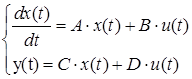
Размерность матрицы A - [Nx×Nx];
Размерность матрицы B - [Nu×Nx];
Размерность матрицы C - [Nx×Ny];
Размерность матрицы D - [Nu×Ny].
1-е число в квадратных скобках – количество столбцов, 2-е число – количество строк. Обязательное условие: Nx≥Ny. Вход и выход блока – векторные сигналы (размерностью Nu и Ny, соответственно).
Входы
- input - входной сигнал.
Выходы
- output - выходной преобразованный сигнал.
Свойства:
- Число переменных состояния – Nx;
- Число входных воздействий – Nu;
- Число выходов – Ny;
- Матрица A(Nx*Nx);
- Матрица B(Nu*Nx);
- Матрица C(Nx*Ny);
- Матрица D(Nu*Ny);
- Начальные условия (Nx) – вектор начальных условий, размерностью Nx.
Параметры
- Динамические переменные - внутренние переменные состояния блока;
- Производные - внутренние переменные состояния блока.
