 |
 |
| Векторизован | |
| в палитре | на схеме |
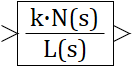
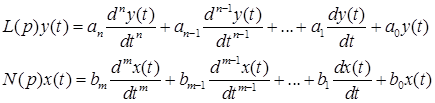
Блок реализует математическую модель звена, динамика которого (для каждого скалярного сигнала) описывается линейным обыкновенным дифференциальным уравнением (ОДУ) вида:


Входы
- input - входной сигнал.
Выходы
- output - выходной преобразованный сигнал.
Свойства:
- Коэффициенты числителя – вектор bj, размерностью [m]. Запись вектора необходимо начинать с нулевого элемента ( [b0, b1,b2...bm] ).
- Коэффициенты знаменателя – вектор ai, размерностью [n]. Запись вектора необходимо начинать с нулевого элемента ( [a0, a1,a2...am] ).
- Начальные условия – вектор начальных значений yi(0) выходной величины блока.
Параметры
- Динамические переменные - внутренние переменные состояния блока;
- Производные - внутренние переменные состояния блока.
Прим.: по умолчанию блок реализует обработку скалярного входного сигнала.
